Roads not taken in satellite photo-reconnaissance: Part 1, the 1960sby Dwayne A. Day
|

| These proposed but unbuilt satellites became footnotes in the official—and classified—histories of the reconnaissance program. They illuminate some of the issues facing the NRO during this time period. |
The proposals below are ones that were intended to lead to operational spacecraft but did not. They are not the preliminary designs that did lead to operational spacecraft. For instance, during the 1960s there were multiple design iterations by both Itek and Perkin-Elmer Corporation as part of the FULCRUM program that eventually led to the HEXAGON spacecraft that entered service in 1971. The early variants for missions that ultimately did come to fruition are not discussed here.
Samos E-3
Year: 1961?
Focal length: unknown
Ground resolution: unknown
Details: Electrostatic tape, transmission to ground
Samos was the first American reconnaissance satellite program. It started out as a program to develop a “Pioneer” and an “Advanced” photographic imaging system, but soon metastasized into numerous different projects, including signals intelligence collection satellites. The photographic satellites received the designation “E” followed by a number. Samos E-1 and E-2 took photographs on film, developed that film in orbit, and then scanned the film using a “flying spot scanner” that turned the light and dark areas on the film into electrical impulses that could be sent to the ground over a radio link and then reconstituted at a ground station and turned into an image.
The inherent limitations of this technology—a finite amount of film and slow processing and transmission times—prompted the Air Force to investigate new technologies. In 1961 they evaluated the use of “electrostatic tape” to record an image. This became known as the Samos E-3 system. There is very little information available about the Samos E-3. It does not appear to have progressed beyond early testing. It may have primarily been a test of the image recording technology and not associated with any particular camera/lens design. It was canceled in 1961 or 1962. There are no details about the intended resolution or area coverage. It never flew.
Samos E-4
Years: 1960–1961
Focal length: 15 centimeters (6 inches)
Ground resolution: unknown
Details: mapping camera
The limits of the E-1 and E-2 film-readout technology prompted the Air Force to look at using film and returning it to Earth. The Samos E-4 was a mapping camera with a focal length of 15 centimeters (6 inches) to take large format photographs of Soviet territory that could then be converted into maps. The camera would have been carried in a large, recoverable reentry vehicle similar to that used for the Samos E-5 system (which carried a much larger camera.) Several E-4 cameras were built before the program was canceled. Unfortunately, like other aspects of the Samos program, no photographs or drawings of the cameras survived.
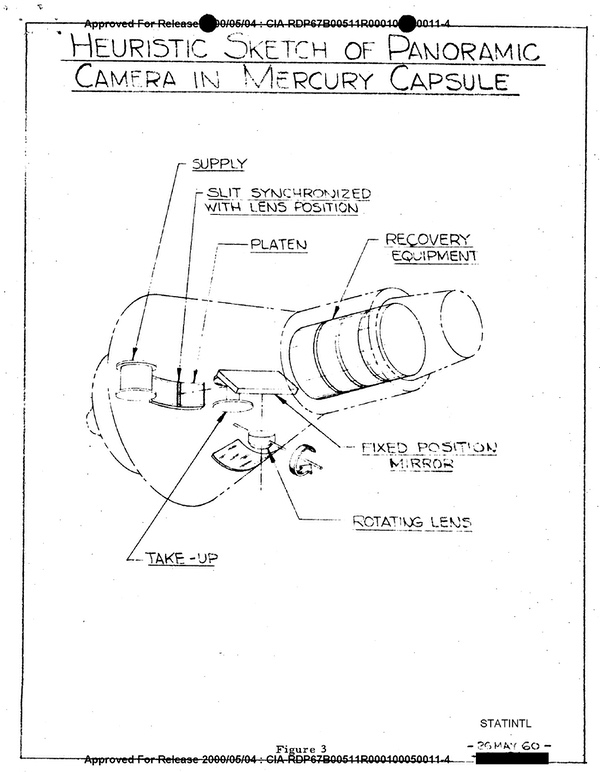 In 1960, the CORONA program (under the cover story of the USAF’s Discoverer program) was suffering from a string of failures. The Hycon Corporation proposed developing a camera that could be carried inside a converted Mercury spacecraft. This version would have used a panoramic system for scanning more ground area. (credit: CIA) |
Mercury Reconnaissance Satellite
Years: 1960
Focal length: 70, 84, or 96 mm
Ground resolution: 150 centimeters (5 feet)
Details:panoramic and framing camera options
By summer 1960, the Discoverer program, which was the cover story for the CORONA reconnaissance program, had suffered a dozen failures. This string of bad luck may have looked like opportunity to officials at the Hycon Corporation, which made aerial reconnaissance cameras for the Air Force and CIA. In June 1960, Hycon proposed a reconnaissance system to the CIA that would have used a Mercury spacecraft with a Hycon camera system inside. The company suggested that both single frame (higher resolution) and panoramic camera versions were possible, and that the cameras could have focal lengths of 70, 84, or 96 millimeters, producing approximately 1.5-meter (5-foot) ground resolution. The spacecraft could operate for three days in orbit. Hycon estimated that they could have a camera system ready for flight within ten months.
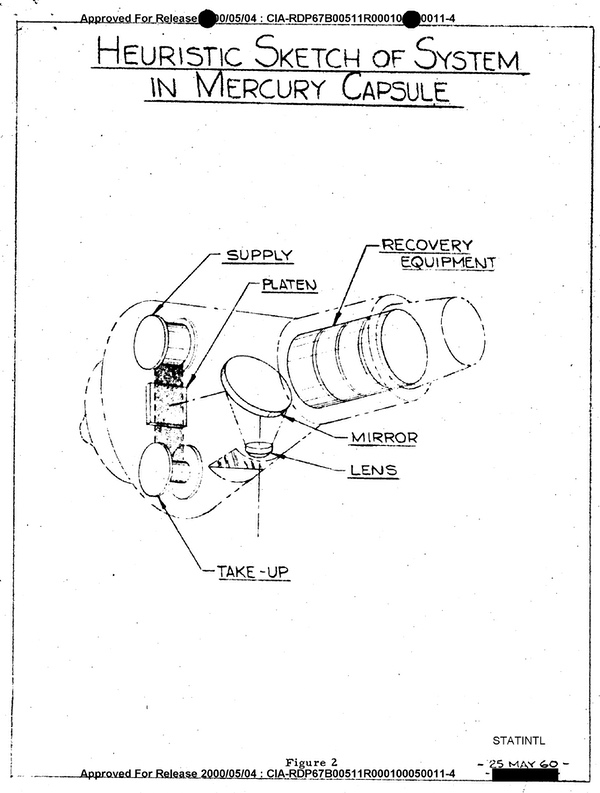 Another Hycon proposal would have mounted a powerful single frame camera inside a Mercury spacecraft to obtain higher resolution images. It is unclear if Hycon was aware of other reconnaissance satellite programs like CORONA that were then underway. Hycon never succeeded in entering the reconnaissance satellite field. (credit: CIA) |
At the time of this proposal, Hycon had already undertaken internal studies of other possible strategic reconnaissance systems, including an X-15 with a more powerful rocket engine and a long focal length camera. The company was also interested in proposals for a reconnaissance version of the Dyna-Soar spaceplane, which was then in development. Hycon never successfully penetrated the space reconnaissance market, which during the 1960s was primarily the realm of Itek (CORONA), Eastman-Kodak (various Samos systems as well as GAMBIT and the Manned Orbiting Laboratory’s DORIAN camera), Perkin-Elmer (for the HEXAGON), and Fairchild (mapping cameras).
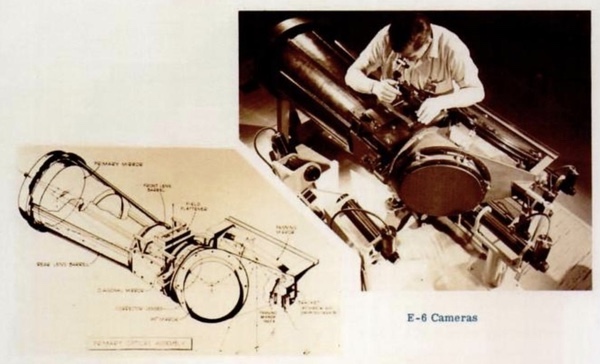 The Samos E-6 camera system consisted of two panoramic cameras. When it was canceled, the NRO's West Coast program office began a project to use a single camera along with the proven CORONA reentry vehicle. It was canceled before it could fly in 1963. (credit: NRO) |
SPARTAN
Year: 1962–1963
Focal length: 91 centimeters (36 inches)
Ground resolution: 180–210 centimeters (6–7 feet)
Details: single panoramic camera
In addition to the Samos E-4, the Air Force pursued development of two other film-return systems under the Samos program. The Samos E-5 was an unusual camera system that was mounted in a pressurized capsule. Although several were launched, the program was unsuccessful, but the camera was later adapted for the LANYARD program. The Samos E-6 was a higher-resolution system that consisted of two cameras built by Eastman-Kodak, each with a 91-centimeter (36-inch) focal length. The film was returned in a long, slender, pointed reentry vehicle that suffered from overheating and burned up in the Earth’s atmosphere. The camera system was more powerful than others then entering service, and Kodak proposed a single-camera design that became known as SPARTAN for its bare-bones approach. Although development started in 1962, SPARTAN was canceled within a year, before it could fly. It was apparently readying for a 1963 launch. SPARTAN’s resolution was 1.8 to 2.1 meters (6 to 7 feet).
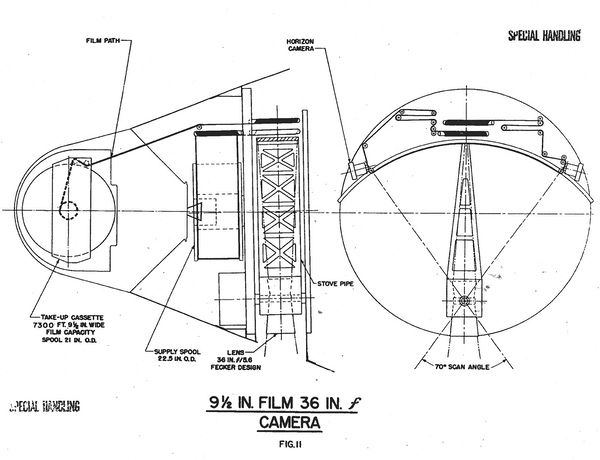 The Itek Corporation designed the CORONA camera system and initially subcontracted Fairchild Camera and Instrument Corporation to build it. In 1960, Fairchild proposed an upgraded version to the CIA, increasing the focal length and film size. Fairchild's argument was that the company was now more capable than Itek. The CIA did not approve the proposal. (credit: CIA) |
Fairchild “1961 CORONA Reconnaissance System”
Year: 1960
Focal length: 91 centimeters (36 inches)
Ground resolution: about 137 centimeters (4.5 feet)
Details: single panoramic camera
The original CORONA reconnaissance camera which first entered service in August 1960 was designed by the Itek Corporation. The camera was based upon a balloon-borne camera named the HYAC (for “high-accuity”) developed for the WS-461L program in 1957. Itek initially lacked the ability to manufacture the cameras and subcontracted Fairchild Camera and Instrument Corporation (FCIC) to build the first units, with the plan being that Itek would take over camera production once it had the capability to do so. FCIC then proposed an improved version of the Itek camera to the CIA and suggested that it take over the CORONA program—almost certainly without Itek’s knowledge.
| That was a rather bold way of saying that Itek might have come up with the original camera idea, but FCIC now knew as much, if not more, than Itek did about how it worked. |
In April 1960, around the same time that Discoverer 11 suffered yet another failure in the Discoverer program that was the cover story for the CORONA reconnaissance satellite program, FCIC sent a proposal to the CIA for a “1961 CORONA Reconnaissance System.” The company proposed several upgrades to the basic CORONA design, including a new lens system and wider film for gathering more imagery. But the company also proposed a greater focal length camera capable of producing higher quality photographs. FCIC was also proposing, in a rather gutsy move, that they be given the contract for this new camera system. This would include both development and production contracts, and all optical testing for the new camera system–yet another way to increase their contract award. Simply put, FCIC wanted to take the CORONA contract away from Itek, the company that had invented the camera in the first place.
FCIC also claimed that their proposal was “based on the hard-won specific design knowledge which is now vested in Fairchild’s physicists and engineers. It is considered evident that in terms of an exacting schedule this knowledge is indispensable; certainly it should not be completely lost to the program.” That was a rather bold way of saying that Itek might have come up with the original camera idea, but FCIC now knew as much, if not more, than Itek did about how it worked. The company also noted that it was in danger of losing expertise as its workload decreased—neglecting to add that this was happening because Itek was beginning production of the camera that Itek engineers had designed, as had been planned from the start.
The existing CORONA camera could produce 19,000,000 square kilometers (7,350,000 square miles) of coverage during a mission, and Fairchild claimed that their new design could produce up to 37,800,00 square kilometers (14,600,000 square miles) of coverage. Assuming that FCIC received a go-ahead in May 1960, the company claimed that it could deliver two prototypes and eight flight units from December 1960 to August 1961. In addition to the new camera with the wider film, FCIC also proposed an upgraded version that would increase the ground resolution. This camera would use a Fecker f/5.6 lens with a 91-centimeter (36-inch) focal length, as opposed to the 61-centimeters (24 inches) of the existing system and 2,225 meters (7,300 feet) of film 241 millimeters (9.5 inches) wide.
The CIA did not accept Fairchild’s proposal, and Itek continued manufacturing the CORONA cameras throughout the life of the program.
 The KH-6 LANYARD reconnaissance system was based upon a modified Samos E-5 camera manufactured by Itek. It achieved only one partially successful mission. Itek proposed a modified “LANYARD-Prime” version that would have added a second reentry vehicle to obtain more imagery. (credit: NRO) |
LANYARD PRIME and QUAD-L
Year: 1963–1964?
Focal length: 168 centimeters (66 inches)
Ground resolution: 61–152 centimeters (2–5 feet)
Details: one or two panoramic cameras
The LANYARD satellite was an effort to salvage the camera developed for the Samos E-5 satellite and pair it with the proven CORONA recovery system. LANYARD flew one semi-successful mission in 1963. LANYARD was overtaken by the debut of the GAMBIT-1 satellite in summer 1963. Although the fixes to LANYARD’s camera system required after its mission were relatively minor, there was no clear requirement for the satellite and it was canceled in 1963 because it did not fully satisfy either the intelligence community’s requirement for broad-area search coverage, or its requirement for high-resolution photographs.
 LANYARD was limited in its ability to obtain stereoscopic imagery over a target, which was useful for determining an object's size (such as the height of a missile). Another Itek proposal was for a “Quad-L” version that would have added a second panoramic camera and second reentry vehicle. The LANYARD program was discontinued in favor of the GAMBIT program that was achieving success by late 1963. (credit: NRO) |
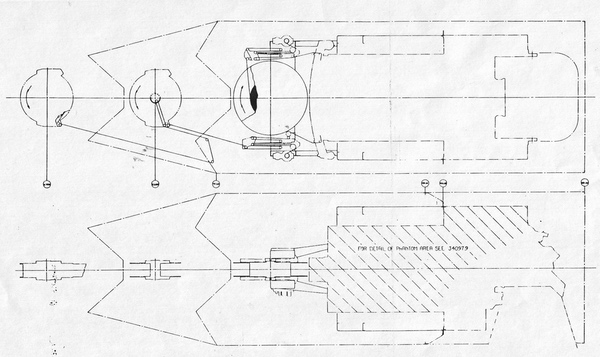
Documents indicate that there was some interest within the National Reconnaissance Office in continuing LANYARD. There are also two documents indicating that Itek may have proposed upgraded versions of LANYARD. One drawing was labeled “L’” or “L-Prime” and added a second reentry vehicle, enabling the satellite to produce more film (assuming that the launch vehicle was also upgraded to carry it). The other drawing was labeled “Quad-L” and depicted two LANYARD cameras, mounted one atop the other, both looking down (out the side of the spacecraft) and feeding to their own reentry vehicles. This would have enabled continuous stereoscopic coverage.
 The CORONA-MURAL was a dual-camera system that entered service in 1962. Here the two cameras are shown turned on their side. A proposed MURAL-2 system would have increased the focal length of the two cameras and therefore increased the resolution. It was rejected in favor of ensuring consistent performance for the existing system. (credit: NRO) |
MURAL-2
Year: 1962
Focal length: 61–91 centimeters; 102 centimeters
Ground resolution: 180–240 centimeters (6–8 feet)
Details: two panoramic cameras
In 1962, the CIA began evaluating a proposed MURAL-2 (or M-2) concept that would have provided a resolution of 1.8 to 2.4 meters (6 to 8 feet) resolution, an improvement over the existing CORONA-MURAL (also known as the KH-4). This would have been achieved by increasing the focal length of the cameras from 61 to 91 centimeters, or even 102 centimeters (24 to 36 or even 40 inches). A high-level advisory committee recommended that rather than seeking higher-resolution imagery from the CORONA system, the CIA should seek to achieve consistently good resolution from the existing cameras. MURAL-2 was not approved.
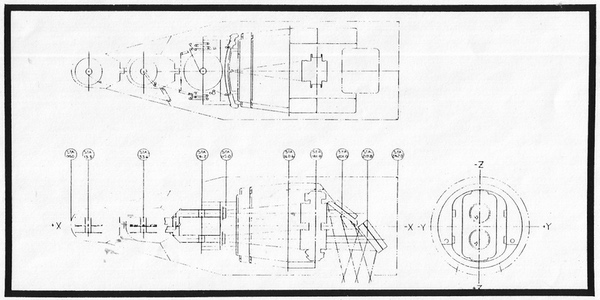
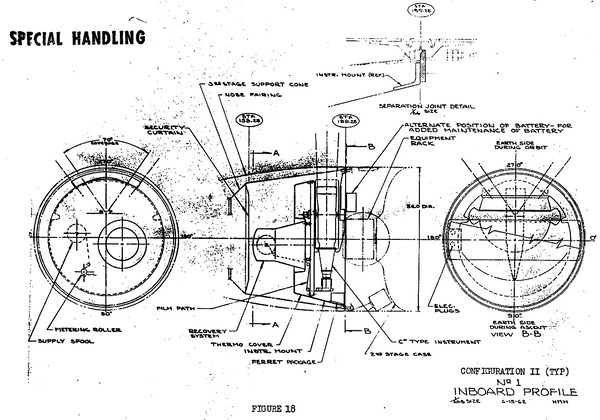
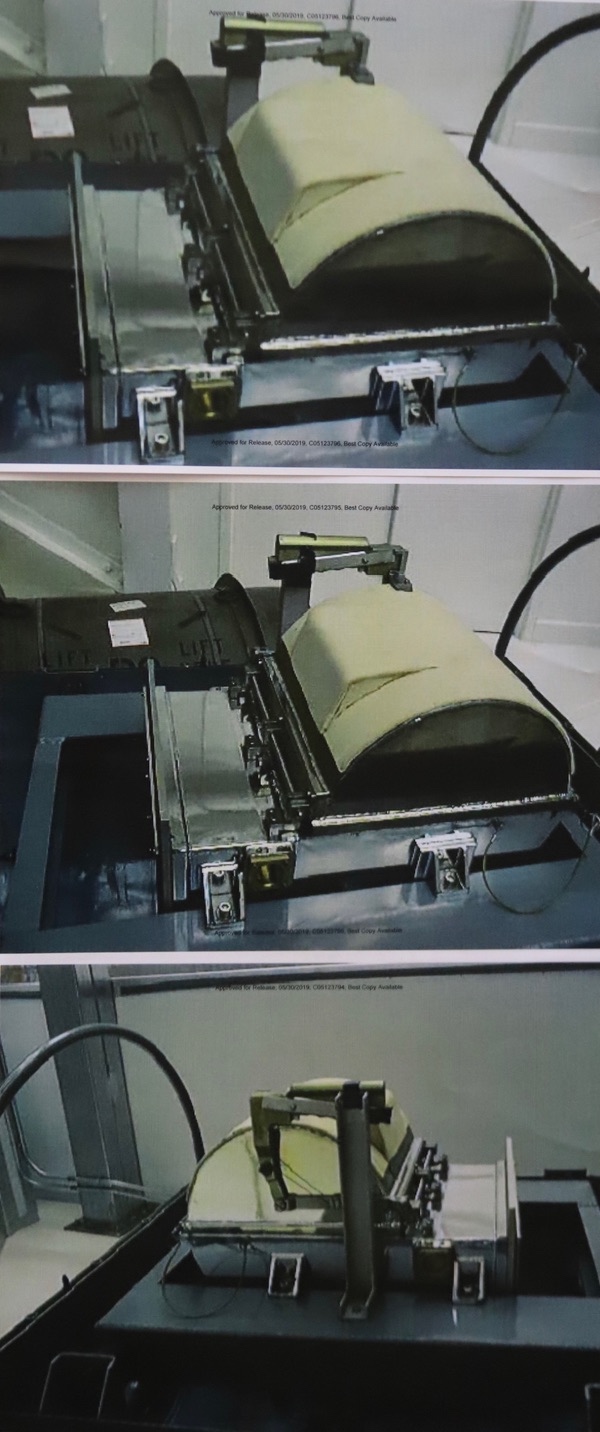 The film-takeup reel for UPWARD. The film would have been sliced and wound up in this container. An astronaut would have then opened the hatch at the top of the Apollo Command Module and retrieved this container. (credit: NRO) |
UPWARD/LMSS
Year: 1964-1967
Details: GAMBIT-1 camera equivalent
UPWARD was the name of a secret program to adapt the GAMBIT-1 reconnaissance camera to fly around the Moon and take photographs of potential Apollo landing sites. It was also known as the Lunar Mapping and Survey System, or LMSS. UPWARD was an insurance policy in case the Lunar Orbiter images were not of sufficient quality to indicate if potential landing sites were safe.
 UPWARD was a program to use the GAMBIT-1 (KH-7) camera for a Moon orbiting mission to photograph potential Apollo landing sites. This camera, left over from the cancellation of the GAMBIT-1 program, was one of two that was allocated to UPWARD. It is currently on display in Rochester, New York. (credit: Dwayne Day) |
UPWARD was started in spring 1964 and officially canceled by spring 1967 after some hardware was built and was nearing thermal and vacuum testing for flight. UPWARD was initially going to mount the camera in the Apollo Service Module’s Science Instrument Module (SIM) bay, but for reasons that are unclear, by early 1966 it was deemed unsuitable for that and the design was changed to mount it inside the cylindrical housing for the GAMBIT-3 satellite. Once Lunar Orbiters had successfully returned photos, UPWARD was no longer needed for its lunar mission. By late 1966 and early 1967, NASA began evaluating how to incorporate the system into a planned Apollo Applications Program flight in Earth orbit. This was later canceled. NASA’s interest in continuing UPWARD as an Earth-orbital system created friction with the National Reconnaissance Office, which was concerned that it would expose NRO activities and compromise security.
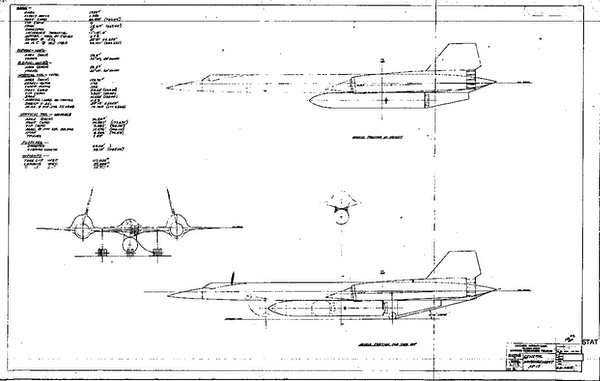 In 1962, Lockheed proposed an “invulnerable reconnaissance” system named the AP-12 that would have been launched from a modified version of the A-12 OXCART Mach 3 aircraft. (credit: CIA) |
AP-12 OXCART-Launched Satellite
Year: 1962
Details: CORONA-derived, single panoramic camera
Throughout the 1960s there were numerous proposals for air-launching satellites, usually reconnaissance satellites, from various aircraft. One such proposal was for launching a rocket off the back of a modified A-12 OXCART reconnaissance aircraft, the predecessor to the SR-71, in order to provide “invulnerable reconnaissance.”
 The AP-12 rocket would have carried a panoramic reconnaissance camera based upon one already developed for the CORONA satellite. (credit: CIA) |
In September 1962, Lockheed proposed the AP-12, which would have carried a solid rocket booster with a reconnaissance camera and recoverable nosecone. The rocket would have been derived from the Polaris A-3 submarine-launched ballistic missile. It would have been carried underneath or on top of the aircraft, although both mounting positions posed serious design and safety problems for the vehicle.
 The AP-12 rocket would have used a reentry vehicle to return film to Earth. (credit: CIA) |
The rocket would have carried a single camera derived from the operational CORONA-MURAL reconnaissance satellite camera. Variants of this camera had already been adapted for the U-2 reconnaissance aircraft.
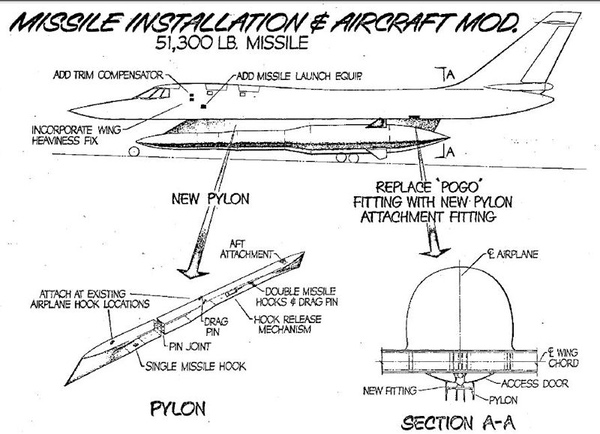 The TOWN HALL proposal would have used an air-launched rocket carried by a B-58 Hustler bomber. (credit: CIA) |
 The TOWN HALL proposal included both a reconnaissance satellite and an anti-satellite weapon. (credit: CIA) |
Project TOWN HALL
Year: 1962
Details: None available
Several early studies of launching satellites from aircraft assumed that the launching platform had to be high speed. In addition to the Mach 3 Lockheed A-12, in 1962 General Dynamics proposed using a Mach 2-capable B-58 Hustler as a launch platform for a missile, a proposal named Project TOWN HALL. General Dynamics proposed that a large missile could be carried underneath the B-58 and based on technology for the Minuteman missile. Missions included reconnaissance and anti-satellite. One illustration showed a placeholder camera payload in the nose of the missile, but no other details are available. The missile would have flown a single orbit profile. No baseline camera system was proposed.
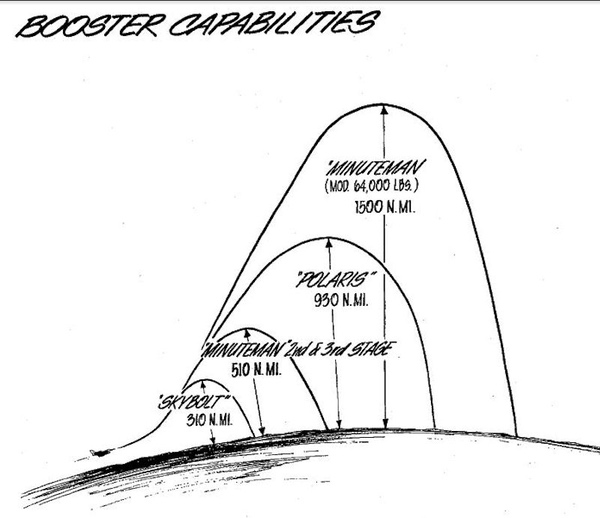 Using different boosters, the TOWN HALL reconnaissance proposal could reach different altitudes and ranges. (credit: CIA) |
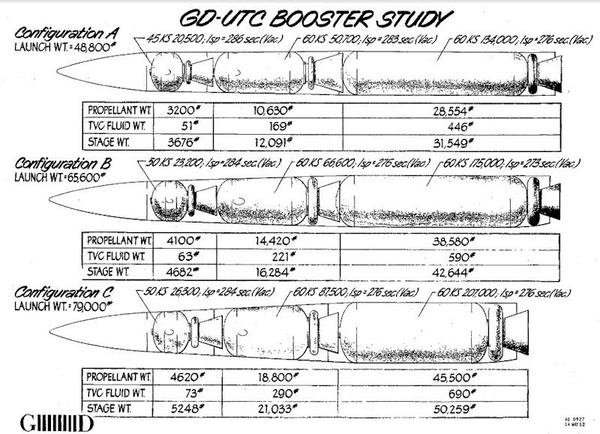 Several rocket configurations were studied for the TOWN HALL proposal. (credit: CIA) |
Another proposal during the 1960s was for a rocket that would be deployed from the rear of a C-130 before firing its motor. Little information is available on this proposal.
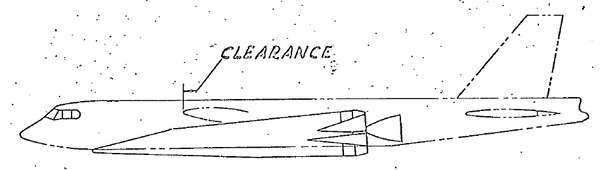 ISINGLASS was a proposal for a Mach 20 reconnaissance system that would have been launched from underneath a B-52 bomber. It was essentially a reconnaissance system intended for use during nuclear war. It proved to be incredibly expensive and was canceled before approval, although some engine and thermal research and development was funded. (credit: NRO) |
ISINGLASS/RHEINBERRY
Years: 1964–1967
Ground resolution: 30 centimeters (1 foot)
Details: single panoramic camera
ISINGLASS was a study and technology development started in spring 1964 of a piloted Mach 20 “boost-glide” vehicle that would have been dropped from a B-52, fired a rocket engine, and overflown the Soviet Union before returning to a safe landing site after completing less than one orbit of the Earth. The ISINGLASS vehicle could have also flown in an unpiloted configuration. ISINGLASS was primarily envisioned as a system that would be used during a strategic conflict (i.e. nuclear war) after most reconnaissance satellites had been shot down. It would have been politically difficult to use the system during peacetime.
Details on ISINGLASS are inconsistent. According to one declassified document, General Dynamics made a proposal of a Mach 5–6 aircraft that would fly at 33,500 meters (110,000 feet), but it was not approved because of vulnerability to Soviet SA-2 and Griffon missiles.
| ISINGLASS was primarily envisioned as a system that would be used during a strategic conflict (i.e. nuclear war) after most reconnaissance satellites had been shot down. It would have been politically difficult to use the system during peacetime. |
Under the code name RHEINBERRY, McDonnell Douglas proposed a design based on its experience with the Mercury and Gemini spacecraft as well as a high-speed reentry test vehicle known as ASSET. The CIA considered this vehicle to be more promising. The aircraft would have been carried to 7,600 meters (25,000) feet by a B-52, released and boosted to an altitude of approximately 61,000 meters (200,000 feet) and Mach 20, achieving a total range of 14,000 kilometers (7,500 nautical miles). Total mission time would be one hour and 15 minutes. It would be equipped with a camera system capable of achieving 30-centimeter (one-foot) ground resolution and a 74–93 kilometers (40–50 nautical mile) swath along a distance of 11,100 kilometers (6,000 nautical miles). McDonnell proposed an eight-aircraft program consisting of three test aircraft and five operational vehicles. It appears as if after the General Dynamics proposal was rejected, McDonnell Douglas’ proposal was renamed ISINGLASS.
 The ISINGLASS reconnaissance system could have used a panoramic camera system based upon the CORONA-MURAL system in use during the mid-1960s. (credit: NRO) |
By February 1966 the CIA proposed an extensive study of all aspects of the ISINGLASS development, based on a McDonnell Model 192 vehicle. It is unclear if this study was approved, but some test hardware for the thermal protection system was developed. The overall ISINGLASS development would have been very expensive (tens of billions of dollars in today’s dollars), the vehicle would have been highly provocative if flown over the Soviet Union, and it would only have been able to photograph a limited number of targets during a single flight.
Although the CIA couldn’t provide funding, the Air Force did provide money to develop an engine for ISINGLASS. It was a powerful engine for its time, known as the XLR-129. The XLR-129 was powered by hydrogen and oxygen and rated at 1.11 million newtons (250,000 pounds) of thrust. The engine was designed for reusability and was equipped with a unique two-position nozzle that would extend at high altitude. An engine study contract was intended to cover a 54-month period, from November 1967 until May 1972. Engineers evaluated the possibility of using fluorine as an oxidizer, but this doubled the program cost. The XLR-129 never finished development, although many of its key subsystems were tested. The program was redirected to a demonstration of critical components and completed in August 1970. The XLR-129 served as the basis, in uprated form, for Pratt & Whitney’s losing Space Shuttle Main Engine proposal in the early 1970s.
 In 1967, Itek Corporation proposed the Geodetic Orbital Photographic Satellite System (GOPSS) with a powerful mapping camera capable of more precisely locating targets on the ground than existing systems. Although it was not approved, it eventually led to a more capable mapping camera included in the HEXAGON reconnaissance satellite in the 1970s. (credit: NRO) |
Geodetic Orbital Photographic Satellite System (GOPSS)
Year: 1966
Focal length: 30 centimeters (12 inches)
Ground resolution: 240 centimeters (8 feet)
Details: mapping camera
Mapping the Earth via satellite was considered a high priority mission from the start of the American reconnaissance satellite program. The ARGON program was a mapping satellite program that operated from 1961 to 1964, using CORONA hardware and a specialized mapping camera. Eventually, mapping cameras were developed that could be incorporated into CORONA spacecraft, although mapping experts were less than happy with the results. For a brief time, the Army considered an ARGON follow-on program under the code names VAULT and TOMAS.
In 1966, Itek proposed a dedicated mapping camera system known as the Geodetic Orbital Photographic Satellite System. The goal was to locate landmarks over the Earth’s surface to high accuracy. The system would include a terrestrial camera and a stellar camera, with a film supply for both, and two Satellite Reentry Vehicles. The camera would have been a 30-centimeter (12-inch), wide-angle lens design. Although the Itek proposal was not adopted, it did lead to development of a prototype lens, and then formed the basis for the later HEXAGON Mapping Camera, built by Itek.
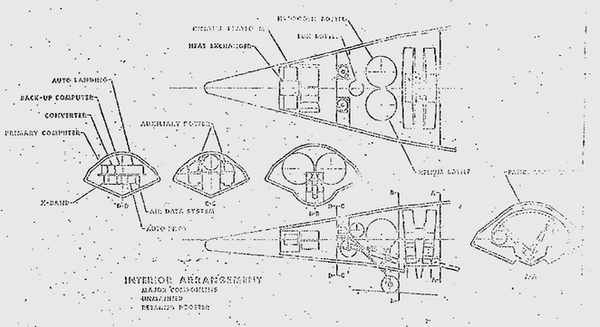
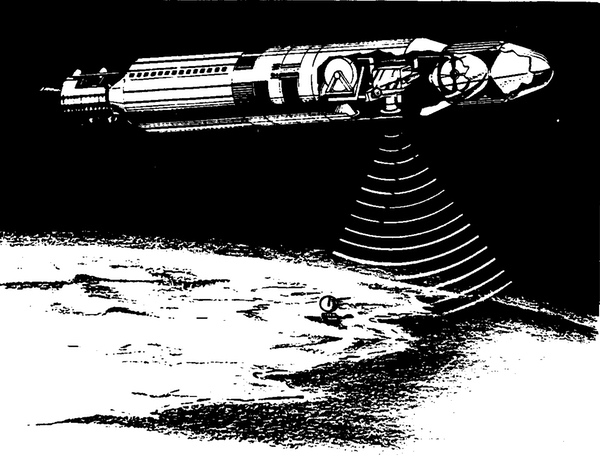
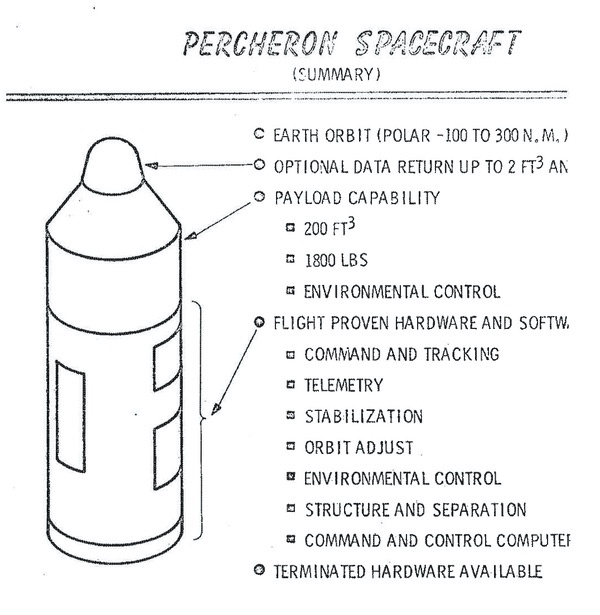 As the GAMBIT-1 (KH-7) program was winding down, General Electric, which built the Orbital Control Vehicle (OCV) which carried the camera system, proposed using remaining OCV hardware to carry cameras for NASA missions. The PERCHERON proposal annoyed officials at the National Reconnaissance Office. (credit: NRO) |
PERCHERON
Year: 1967
Details: Various camera options
PERCHERON was a 1967 proposal by General Electric to adapt the Orbital Control Vehicle (OCV) that it had developed for the GAMBIT-1 (KH-7) reconnaissance satellite to carry a different set of cameras for a NASA Earth observing mission. The GAMBIT-1 program was ending as it was replaced with the more powerful GAMBIT-3 system. GAMBIT-3 also used a camera manufactured by Eastman-Kodak, but replaced General Electric’s OCV with a spacecraft built by Lockheed. GE’s proposal was to use two remaining OCVs left over after the end of the GAMBIT-1 program, converting them to carry a variety of NASA Earth observation payloads, including up to six large format (i.e. low-resolution, large area) cameras. PERCHERON would have carried only a single reentry vehicle for film.
 One proposal for PERCHERON would have equipped it with numerous low-resolution cameras. (credit: NRO) |
The program was never approved by NASA, which was more interested in technology that became the Landsat program. Because Landsat required lower resolution, it was better suited to transmission techniques, and its data could be more widely shared. In addition, emerging video technologies offered greater possibilities for expanded resolution coverage. GE’s PERCHERON proposal annoyed officials at the NRO, who believed that it threatened the secrecy of their programs, one of many such uncomfortable encounters with NASA over the years.
In 1969 NASA also evaluated several other Earth remote sensing options that would have used the reentry vehicles and satellite structure of the CORONA satellite, but with different combinations of lower-focal length framing cameras installed as opposed to the CORONA panoramic camera systems.
 General Electric's PERCHERON proposal was made at a time when NASA was evaluating future Earth observing systems. NASA considered film-based systems, including CORONA variants, before deciding upon the technology that led to Landsat. (credit: NRO) |
CORONA J-4
Year: 1967
Focal length: 81 or 102 centimeters (32 or 40 inches)
Ground resolution: 140 centimeters (4.5 feet) or better
Details: two panoramic cameras
The CORONA J-4 was a proposed upgrade to the KH-4B CORONA satellite with its J-3 camera system. Beginning in May 1967, as the J-3 was being prepared for spacecraft integration and launch, and the HEXAGON that would replace CORONA was still years from flight, Itek proposed a further upgrade, which became known as the J-4 camera system. This would increase the focal length from 61 centimeters (24 inches) to either 81 or 102 centimeters (32 or 40 inches). That would improve the central ground resolution to 1.4 meters (4.5 feet) or better. Along with the upgraded camera, the new system would include a 30-centimeter (12-inch) stellar-indexing camera. This would also require a more powerful booster. On-orbit lifetime could be increased to eighteen days.
| GE’s PERCHERON proposal annoyed officials at the NRO, who believed that it threatened the secrecy of their programs, one of many such uncomfortable encounters with NASA over the years. |
Itek’s initial estimate was that this J-4 system could enter service in the first quarter of 1971, eventually replacing the J-3, which at that point was scheduled to be phased out by June 1971. Itek’s proposal was for 20 new J-4 CORONAs, enabling the system to stay in service until mid-1973. By late 1968, the NRO leadership considered CORONA to be a “terminal program”—to be replaced by the much larger and far more capable HEXAGON in two years. With HEXAGON underway, there was no need to update CORONA yet again, even if HEXAGON’s service entry was delayed.
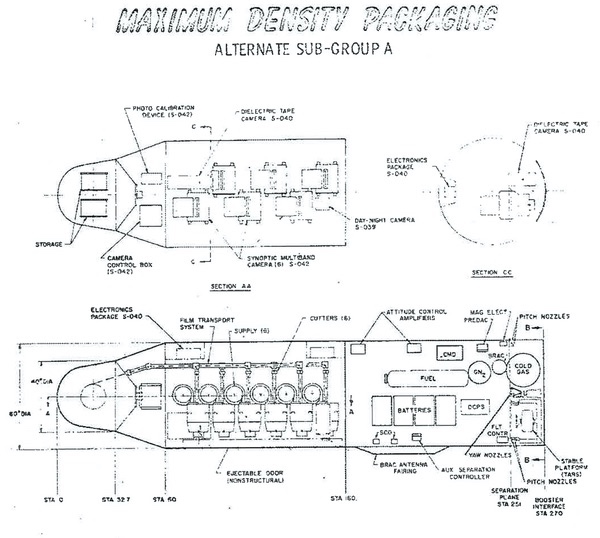
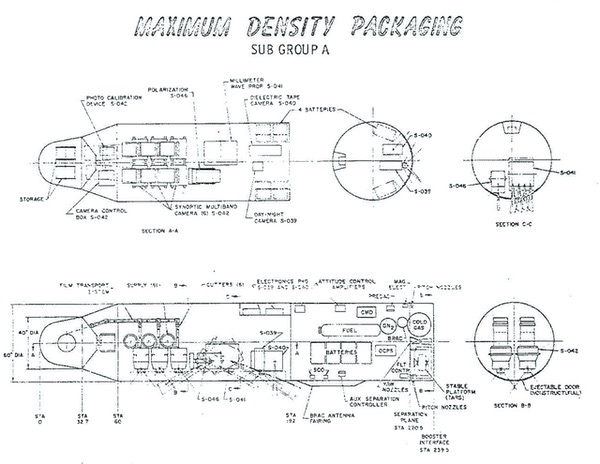
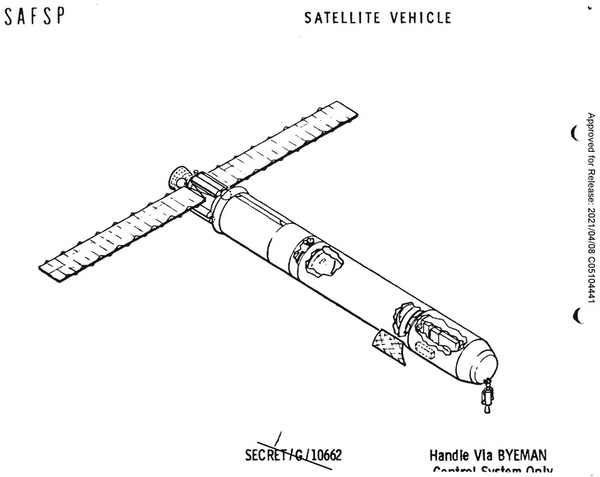 Film Read Out GAMBIT was a proposal for a near-real-time reconnaissance satellite. Originally proposed in the mid-1960s, FROG was revived late in the decade and approved for development in 1971, only to be canceled months later in favor of the KH-11 KENNEN electro-optical imaging system. (credit: NRO) |
Film Read Out GAMBIT/FROG
Years: 1965–1971
Focal length: same as GAMBIT-3
Ground resolution: 30 centimeters (12 inches)
Details: GAMBIT-3 camera, film-readout and transmission to ground
FROG stood for Film Read Out GAMBIT, and it was to be a modified version of the GAMBIT-3 satellite that would develop the film on orbit, scan it, and then beam the data down to a ground station. The goal was 30-centimeter (one-foot) resolution, which was apparently the same as the resolution then being regularly achieved with the GAMBIT-3 in film-return mode.
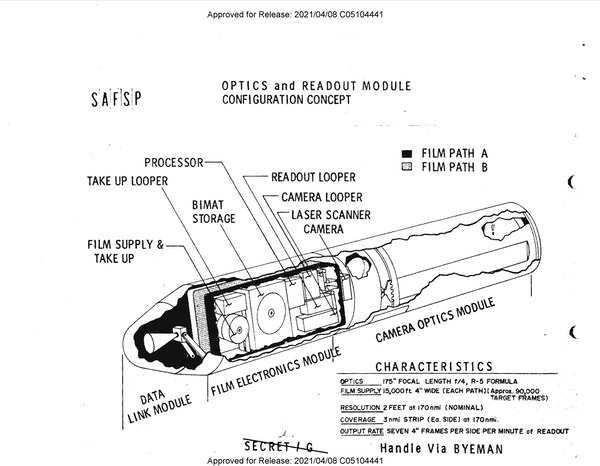 FROG would have used the powerful GAMBIT-3 reconnaissance camera and a system for developing and scanning the film onboard and beaming the imagery to the ground. (credit: NRO) |
FROG went through several phases. Initially it was proposed as an experimental program in the mid-1960s, but this was rejected. It may have initially been proposed as an interchangeable front-end to the spacecraft that could replace the reentry vehicle with a readout system, but this is unclear. It appears that by the late 1960s although the concept of the interchangeability of the system was abandoned, FROG would have consisted of the film-readout system and a relatively unmodified GAMBIT-3 camera system. At some point, probably around 1970, a variant was studied that would consist of a GAMBIT-3 camera system equipped with both reentry vehicles (at least two) and a readout system. This would have enabled the FROG satellite to perform the high-resolution reconnaissance mission first, recovering exposed film in the reentry vehicles, followed by a lower-resolution readout mission.
Although timelines are unclear based upon the documents released so far, it appears that the final FROG system proposal was for a readout-only system with no reentry vehicles, although the reentry vehicle/readout option was still under consideration as late as April 1971. FROG was canceled in November 1971, in favor of the KH-11 KENNEN reconnaissance satellite.
Next: The 1970s.
Note: we are using a new commenting system, which may require you to create a new account.