The flight of the Big Bird (part 2)The origins, development, and operations of the KH-9 HEXAGON reconnaissance satelliteby Dwayne A. Day
|
{kind=link}
| To say that the American reconnaissance satellite program was a battlefield during the mid-1960s would be an understatement. |
In an effort to smooth over relations between the two organizations, senior DoD and CIA officials agreed to create a new NRO charter in August 1965. This created a three-member National Reconnaissance Program Executive Committee (EXCOM) composed of the Deputy Secretary of Defense, the Director of Central Intelligence, and the President’s Science Advisor. The NRO director was a non-voting member. This committee took over much of the authority previously held by the Director of the NRO (DNRO), including program and budget approval. In October 1965, DNRO Brockway McMillan, resigned—apparently after being pushed—and was replaced by Al Flax. The acrimonious relationship between the CIA and the NRO slowly started to improve.
At the time that the CIA pulled Itek’s FULCRUM contract to develop a powerful camera for a new search satellite, there were apparently three other possible systems to serve the new requirement for photographing large areas at high resolution. Kodak was working on both the “S-2” and a simpler system called MATCHBOX. Perkin-Elmer, based in Danbury, Connecticut, also had some ideas. But despite a long history developing various optical systems Perkin-Elmer had never worked on a satellite project.
From bombsights to orbit
Perkin-Elmer, like many of the companies involved in satellite reconnaissance, remains a bit of a cipher. Itek was long known as an optics company, but until the CORONA program was declassified in 1995, few people outside of its workforce were aware that most of the company’s early income had come from developing top secret cameras. Similarly, Kodak was long known—at least until the bottom dropped out of its business—as a film manufacturer. Kodak’s corporate leadership did not want the American public to know that the company responsible for preserving happy memories of the family’s visit to Disneyland also produced cameras for reconnaissance satellites and supplied the film for U-2 spyplanes and satellites.
Perkin-Elmer, like Itek, was largely invisible to the broader public until 1990, when the company obtained the kind of publicity that it never wanted. That happened when NASA finally launched the much-delayed Hubble Space Telescope and quickly discovered that its mirror was flawed. The flaw was traced back to the mirror’s manufacturer, Perkin-Elmer, and lax oversight by NASA.
Perkin-Elmer was started in the 1930s by Charles W. Elmer and Richard Perkin. Neither had a background in optics, but both had a passion for astronomy and they soon formed a company to make precision optics. The onset of World War II led their company to quick profitability manufacturing airplane range finders, bombsights, and reconnaissance systems. By the end of the war the company had moved into the field of analytical instruments for laboratory use and production control. By the 1950s Perkin-Elmer had also manufactured its first telescope and a very large format Transverse Panoramic Camera mounted in an Air Force bomber.
| Although the new NRO charter was intended to ease relations between the DoD and CIA sides, it didn’t do so immediately. |
It is not clear from available sources exactly when and how the CIA turned to Perkin-Elmer, although the agency had apparently been in contact with the company before it awarded the initial study work for a new search satellite camera to Itek in early 1964. But at some point, the CIA’s Director of Science and Technology Bud Wheelon paid a visit to Perkin-Elmer where he asked an employee named Rod Scott about his ideas for conducting reconnaissance. Scott told him about the “twister.” According to Jeff Richelson in The Wizards of Langley, the twister allowed images to be recorded on film that was see-sawed back and forth instead of moving the film frame by frame into the camera.
According to Richelson, the twister solved several problems at once, most notably allowing the designers to mount the cameras in the vehicle so that they were parallel to the satellite’s motion rather than perpendicular. Because they could be mounted like this, they could also be bigger and thereby achieve the desired resolution. The cameras also worked by rotating the focal plane and not the entire camera, presumably reducing the mass of the moving equipment, something that was always a concern for camera designers because the spacecraft could move in reaction and blur the imagery.
Richelson recounts that when Wheelon told longtime camera designer and intelligence advisor Edwin “Din” Land about the twister, he loved it. According to Richelson, Brockway McMillan noted that Land was a scientist, not a systems engineer, and he “liked nothing more than an innovative, clever device.” The CIA then allocated $10–30 million to get the project going. However, making such a complex piece of equipment work was going to be a great challenge.
Managing the monster
Because the director of the NRO wanted to keep Itek involved in satellite reconnaissance development, and presumably because Kodak already had plenty of work, McMillan transferred Kodak’s S-2 system to Itek. McMillan still sought to keep the CIA from running away with its own reconnaissance camera system without conducting a full comparison of the various proposed systems—i.e. S-2 and MATCHBOX, as well as the new Perkin-Elmer design. But he was thwarted in this effort, and the August 1965 NRO charter made it clear that the decision on a camera system would be made by senior DoD and CIA officials—above McMillan’s head.
Although the new NRO charter was intended to ease relations between the DoD and CIA sides, it didn’t do so immediately. McMillan’s departure from the NRO in October 1965 helped, and Wheelon’s departure from the CIA on September 26, 1966, helped some more. Deputy Secretary of Defense Cyrus Vance ruled that all of the effort on the new search satellite system was to concentrate on camera systems, not satellite vehicles, reentry capsules, boosters, or subsystems. But a fair amount of work on some of these systems had already started. Nevertheless, work on the satellite and recovery and subsystems ceased in September 1965.
There were several reviews of camera system design status in December 1965 and January 1966 that indicated that one of the designs—presumably the S-2—“was developing slowly,” in the words of a former reconnaissance historian.
In April 1966 the EXCOM made some final decisions over responsibility for management. The CIA retained camera design responsibility and the Air Force component of the NRO, known as Program A and based in Los Angeles, got responsibility for the main vehicle structure.
The new NRO Director, Al Flax, declared that both the NRO and the CIA project office could issue program access clearances and had to honor the need-to-know determinations of the other. CIA asked for a veto and Flax said that his goal was “to eliminate the use of security as a means of frustrating… legitimate access to information…” Apparently Flax prevailed and the various parties took another step towards establishing a more civil working relationship.
After over a year and a half of fighting, the NRO, US Intelligence Board, and CIA all generally agreed on the requirements for the system regarding orbital life, resolution, coverage, and at least one other still-classified category.
HEXAGON
On April 30, 1966, the CIA gave the system a substitute code name, which was possibly AQUILINE. However, they soon discovered that AQUILINE was already in use for another project—a stealthy unmanned aerial drone that never became operational—and so the satellite program was renamed HEXAGON. At some point the camera system was also given the designation KH-9. The “KEYHOLE” designation was applied to American reconnaissance satellite cameras. If a camera was substantially upgraded, its designation might be changed with a suffix—the KH-4 CORONA became the KH-4A and then the KH-4B, for example—or it might be changed even while the overall program name stayed the same, such as the KH-7 GAMBIT being upgraded to become the KH-8 GAMBIT.
| Decisions about the size of the camera, the number of film-return vehicles, and the amount of film to be carried all naturally had an impact on the size of the spacecraft and subsequently on the rocket necessary to place it in orbit. |
Camera source selection was assigned to a board headed by Les Dirks of the CIA and composed of four additional members, two from the CIA and two from the NRO. They were supposed to receive inputs by July 22, 1966. Booster proposals were due by September 1 and Al Flax expected contract negotiations to be finished by November 1966.
In the summer of 1966, Perkin-Elmer was finally awarded the development contract over the competing S-2 design. The CIA created the Sensor Subsystem Project Office to formally manage camera development.
The Perkin-Elmer camera system consisted of two cameras. According to Richelson, they had 60-inch (1.5-meter) diameter mirrors, although it is also possible that this was the focal length, which would have made them slightly less powerful than the KH-7 GAMBIT with its 77-inch (1.95-meter) focal length camera. The HEXAGON devices were “optical bar cameras.” (See “Ike’s gambit: The development and operations of the KH-7 and KH-8 spy satellites”, The Space Review, January 5, 2009.)
The cameras could operate individually, or could be used to provide stereo coverage of a target. According to Richelson, the resolution at nadir, or straight down, was three feet (0.9 meters). The swath width was 80 by 360 miles (129 by 579 kilometers), twice that provided by the KH-4B CORONA. Normally the cameras scanned 30 degrees to either side of nadir. But they could also scan 60 degrees to either side of nadir—or horizon-to-horizon-as the CIA had insisted, although their resolution near the edges was only six feet (1.9 meters). No matter which way they operated, they still required a massive amount of film to travel through the camera at high speed.
Returning to Earth
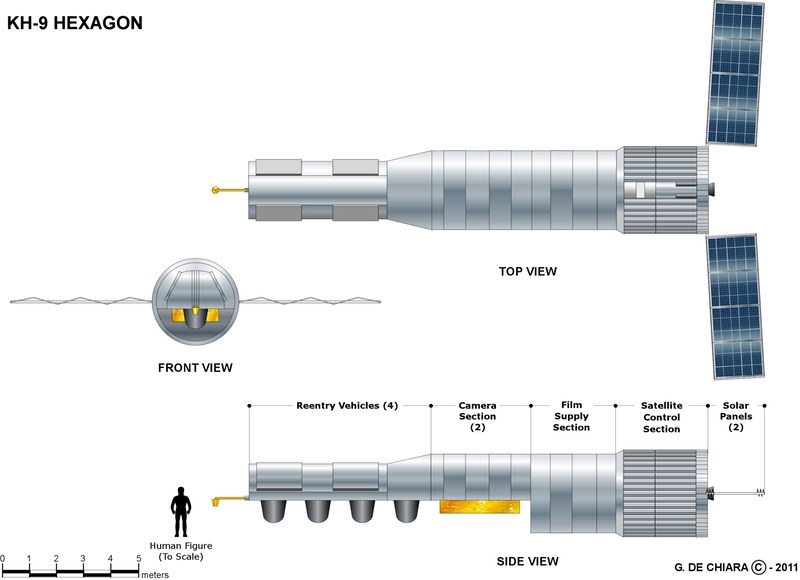
HEXAGON’s big camera would be mounted in the middle of the spacecraft. Behind it was a massive film supply drum for feeding two strips of film forward and through the cameras. Forward of the camera would be the “satellite recovery vehicles” (or SRVs) used to return the exposed film to Earth. The most likely design for these reentry vehicles would follow the approach used for CORONA consisting of a kettle-shaped metal “bucket” holding the big film takeup spools. The CORONA bucket had a diameter at its upper ring of approximately two feet (0.6 meters). The bucket would be protected within a rounded-cone-shaped ablative reentry shield that would be jettisoned after the parachute deployed. One photo, apparently taken in the 1980s, shows Air Force rescue divers with what is probably a practice KH-9 film-return bucket. The rescue divers had to practice securing a bucket that landed in the ocean and hooking it to a helicopter recovery cable. Although the size of the bucket is unknown, it appears to be greater than three feet (0.9 meters) in diameter.
At the time, the KH-4A CORONA system had two film-return vehicles. The KH-7 GAMBIT and its replacement the KH-8, both had a single film-return vehicle (the KH-8 would get a second return vehicle starting in 1969). The typical operating mode was to launch the satellite and immediately operate the camera for several passes over the Soviet Union, then bring the first return vehicle back to Earth. The spacecraft would then enter “zombie mode” and go to sleep for about a week. It would then be turned on again, fill up the second recovery vehicle, and send that back to Earth.
Soon, the United States Intelligence Board, which formally established reconnaissance satellite requirements, and the Land Panel, which advised the CIA on overhead (i.e. aircraft and satellite) reconnaissance issues both recommended “incorporation of a supplemental crisis reconnaissance capability.” What this meant is still not clear from the available sources, but it may have meant equipping the spacecraft with more return vehicles than were required for the basic mission, so that film could be returned to Earth faster if necessary without prematurely ending the mission. Alternatively, it may have meant adding a read-out capability to beam some images directly to the ground.
The HEXAGON spacecraft was equipped with four reentry vehicles. They were mounted along the bottom of a long boom that extended out the front of the spacecraft. The film ran through this boom and into the reentry vehicles. However, this presented a challenge—how to get the film into the next vehicle after the first one was filled up and jettisoned. It is unclear how designers solved this problem. The Itek engineers who designed the KH-4A CORONA vehicle had come up with a clever solution to this problem: they ran the film into the second reentry vehicle where it went over a little spool built into the axel and then back out of the reentry vehicle and up to the first reentry vehicle. When the first reentry vehicle was full, a guillotine in the first vehicle cut the film and the second film-takeup spool turned just enough to wrap the extra bit of film into the second reentry vehicle. It seems unlikely that Perkin-Elmer’s engineers took the same approach, because this would have meant running the film through three reentry vehicles before going into the first one, but there is no reason in principle why they could not have used this technique.
The Air Force officers responsible for writing the recovery vehicle proposal guidelines started drafting them in June 1966 and issued the request for proposals from industry the next month. It took almost two years before the recovery vehicles were contracted, even though initial estimates had been that all subsystems would be ready within 18 months of program start.
By the late 1960s there were several companies that could potentially provide the reentry vehicles. The most experienced company by that time was General Electric, which had manufactured the reentry vehicles for all of the CORONAs and GAMBITs. Another company with extensive reentry vehicle capability was AVCO, which had developed various reentry vehicles for ballistic missiles. Lockheed had also built reentry vehicles for the Navy’s Polaris ballistic missile. But several other companies also had experience with reentry vehicles. Notably, McDonnell Douglas had developed the Mercury and Gemini spacecraft which had large heat shields and had performed admirably in NASA service, and the company could have built the larger reentry vehicles required for HEXAGON.
Decisions about the size of the camera, the number of film-return vehicles, and the amount of film to be carried all naturally had an impact on the size of the spacecraft and subsequently on the rocket necessary to place it in orbit.