Spinning for the prizeby Rex Ridenoure
|
 Harold Rosen (at right) with Hughes colleague Tom Hudspeth displaying a full-scale model of their proposed geostationary satellite on the observation deck of the Eiffel Tower during the 1961 Paris Air Show. Local media claimed that “this is the highest that satellite will ever get.” (credit: Boeing Satellite Systems) |
Syncom 1 was launched in February of 1963 and achieved the desired orbit, but suffered an immediate electrical failure. Five months later, Syncom 2 was successfully launched and began operating nominally. Syncom 3 repeated the achievement a year later.1
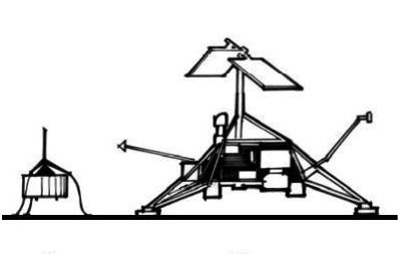
| “That design was so big and clunky, and so expensive,” Rosen said of Surveyor. “I knew back then that there was a much more elegant and cost-effective way to land.” |
During 1960–1961, while Rosen and his team were immersed in their Syncom work, Hughes was bidding to be the prime contractor for NASA’s planned series of robotic lunar landers, Surveyor. The Caltech/NASA Jet Propulsion Laboratory had already developed a notional design for the lander and was looking to the emergent US space industry to complete the detailed design and then build the spacecraft.
Rosen was asked to peer review his firm’s proposal, and came away unimpressed. “That design was so big and clunky, and so expensive,” he recounted some 48 years later. “I knew back then that there was a much more elegant and cost-effective way to land.”
But at Hughes, Rosen never got a chance to try out his lander concept. He urged his management to counter-propose to JPL an alternative lander concept, which he was ultimately allowed to do. He prepared a proposal and pitched it to JPL, but got a lackluster response from those managing the Surveyor program. So Rosen let it slide and focused on Syncom—and other things.
Buoyed by his credibility earned from the Syncom successes, Rosen stayed at Hughes for 30 more years, leading and growing an innovative spacecraft systems team which, by the mid-1980s, dominated the global commercial communications satellite industry. Along the way, as VP and CTO of Hughes’ Space and Communications Group, Rosen became legendary as “father of the geostationary communications satellite,” as a technical innovator with more than 75 patents, and recipient of most major global accolades in the space and technology arenas, including the US National Medal of Technology.2
After retiring from Hughes (now Boeing Satellite Systems in El Segundo) in his 60s, Rosen started Rosen Motors with his accomplished brother Ben Rosen (of Compaq Computer and venture-capital fame), which by the late 1990s had successfully road tested the first gas turbine-powered car with flywheel-augmented drive train and regenerative braking system. After this venture, well into his 70s and still very active mentally and physically, Rosen continued strategic consulting with Boeing Satellite Systems while noodling alternative energy concepts in his spare time.
Entering the competition
With much fanfare, the $30-million Google Lunar X PRIZE (GLXP) was announced in downtown Los Angeles in September, 2007 (see “Google’s moonshot”, The Space Review, September 17, 2007). Team Odyssey Moon, formed and led by Bob Richards, a long-time collaborator of X PRIZE founder Peter Diamandis, concurrently announced that it was going to compete for the prize.3
Rosen’s wife, Deborah Castleman, also an experienced space systems engineer/manager, brought the GLXP to Rosen’s attention, now in his early 80s and enjoying semi-retirement in Santa Monica. Still energetic and sharp as a whip, he weighed in: “Finally, I get to try out my lander idea!”
 One of Rosen’s favorite activities while enjoying semi-retirement in Santa Monica. He started his Google Lunar X PRIZE team at age 82. (credit: Ning Ridenoure) |
Rosen and Castleman both enjoyed stellar space-technology track records over decades, were well-connected, and had a loyal following, especially in Southern California. They quickly assessed the GLXP competition rules and formed a small technical team with a handful of trusted associates (including Rosen’s son and grandson) to flesh out how Rosen’s lander concept might apply to the competition.
After a series of ad hoc meetings and phone calls, they registered the team into the competition as a stealth team (known only to the X PRIZE Foundation): the Santa Monica Selene Group. Rosen was named Team Leader and Castleman Associate Team leader.
In a later blog posting at the team’s GLXP website4, Castleman summarized the overarching goal of the team:
“[We] registered our team to compete for the Google Lunar X PRIZE to demonstrate that a low-cost space mission to the Moon could be accomplished and could lead to lowering the cost of some future robotic missions to planetary moons. Plus, we intended to have fun!”
 Rosen’s original GLXP team in when first registered as the Santa Monica Selene Group. Left to right: Max Johnson, Dorian Challoner, Susan Sloan, John Smay, Deborah Castleman Harold Rosen, Brian Bliss, Robert Rosen, Josh Rosen. Everyone except the two high school students (one on each end) were current or past employees at Hughes Space & Communications. (credit: Deborah Castleman, December 2007) |
| Individually, all of the technical team had worked from years to decades at Hughes Space and Communications, and combined their names appear on 130 space-related patents. This small group had over 400 years of space industry experience. |
Returning compelling video from the landing and surface operations mission phases—“Mooncasts” in GLXP parlance—is a key requirement for winning the prize. As the world-leading supplier of rugged video systems for use on board rockets and spacecraft, the firm I was leading at that time, Ecliptic Enterprises Corporation, with its RocketCam product family, got peppered with calls from GLXP teams starting the day after the prize announcement.
Rather than commit to any particular team or teams, I decided to register Ecliptic as a stealth team as well, figuring that eventually we’d be sitting at the table with all teams and could pick our own winners to partner with. I submitted our registration just before the deadline at the end of 2007.
What I didn’t know at that time was that for his team entry Rosen had recently recruited a former Hughes engineer/manager to be his Project Manager: Ron Symmes. Symmes had spent much of his career at Hughes (and then Boeing), ultimately retiring as an Executive VP in charge of their billion-dollar-per-year commercial satellite business. He’s credited as the brainchild of Hughes’ most popular satellite model, the HS-601. He was one of the first engineers I had met when first starting my career (at Hughes Space and Communications), and for several years he had been a strategic advisor to Ecliptic.
In mid-January 2008, Symmes called me and said he was working on a space project that needed an onboard video system. I pressed him for some details and he replied, “Have you ever heard of the Google Lunar X PRIZE?”
“Sure,” I said. “In fact, Ecliptic is registered as a stealth team.”
“Oh… really?” Ron chuckled. “So is the team that I’m on!”
This exchange started an interesting unpeeling of mutual non-disclosure agreements over a day or two until it was clear what was going on with both teams. Once I realized that Symmes was on a crack team led by the legendary Rosen I was intrigued, and once I got an inkling of Rosen’s new lander concept from a simple home-made video5, I was hooked.
After an introductory meeting with Rosen and his expanding team, I was invited in late January 2008 to be Deputy Project Manager—a position I enthusiastically accepted. I also withdrew Ecliptic’s stealth registration after explaining the situation to the X PRIZE Foundation.
SCSG
By early 2008, Rosen’s all-volunteer team consisted of eleven experienced space systems, avionics, and propulsion engineers; two grad students; a practicing artist; and two high school students.
Individually, all of the technical team had worked from years to decades at Hughes Space and Communications in El Segundo, and combined their names appear on 130 space-related patents, many of them fundamental patents. This small group had over 400 years of space industry experience and had actively contributed to over 500 actual space missions. (See the full team bios here.)
After assessing the team’s composition, likely partners needed to win the prize and cultural heritage of the group—ex-Hughes, most with one or more college degrees from Caltech, UCLA and/or USC—I suggested to Rosen and Castleman that the team’s name be changed to Southern California Selene Group. They concurred, so we became SCSG instead of SMSG.
By early February, team activity ramped up on all fronts in anticipation of a big event planned for February 21st at Google headquarters in Mountain View, California: the public announcement of all registered teams. The SCSG mission design and spacecraft system design were refined, potential suppliers and partners visited, photos and videos taken and edited, website entries posted, team background info written, handouts prepared, and travel and hotel reservations made. It was a busy time.
The full team typically met on Saturdays at the Rosen-Castleman home in Santa Monica, with splinter meetings during the week at various favorite restaurants and haunts in the El Segundo area. Since most of the team members had worked together before—some on many dozens of missions—the inherent effectiveness and productivity of the team was palpable. I witnessed more technical output during a single week from this small team than other larger teams I have been involved with could generate in a month.
 A typical SCSG team meeting at the Rosen-Castleman home in Santa Monica, mostly conducted with paper, pencil and brains. (credit: Josh Rosen, March 2008) |
A novel lander concept
Starting with the Syncom series in the early 1960s at Hughes, Rosen and his technical staff pioneered the science, engineering and art of spinning satellites, first with increasing capable “solid spinners” where the entire satellite spins like a gyroscope, and, by the late 1960s, “dual-spin” designs, where part of the spacecraft spins and another part is maintained in a “despun” state. In a dual-spun design, the two sections are connected via an integrated mechanical bearing/electric spin-rate control motor (rotor controller); the assembly also allows for the transfer of power and signals across the spun-despun interface.
Both spacecraft architectures are quite scalable in size and capability, and for nearly forty years Hughes successfully developed and launched dozens of variations and hundreds of individual satellites, dominating the industry with proposal win rates often in the 60–80% range.
“If it spins, it wins!” was one of Rosen’s favorite proclamations during those heady years.
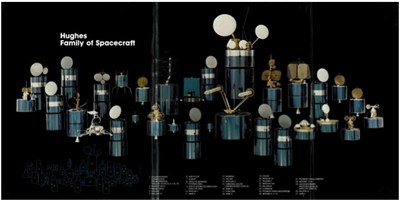 The spinning satellite heritage pioneered by Rosen at team at Hughes during the 1960s, 70s and 80s. (The oddball is the Surveyor lunar lander, a JPL design built by Hughes for NASA.) Spinning satellite designs captured early dominance in the commercial space arena because their various subsystems were inherently simple, mass-efficient and scalable. Incremental changes in size and functionality developed over nearly four decades and applied to over 130 missions clearly demonstrated the versatility of the spinning architecture. (credit: Hughes Space and Communications, 1985) |
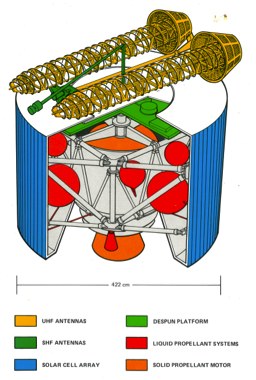 In a dual-spin satellite, typically the telecommunications payload electronics and antennas are on the despun side, while power, propulsion and primary structure are on the spun side. Shown here is the layout for one of the largest dual-spinners produced by Hughes, Leasat (also called Syncom 4), five of which were launched and deployed by the Space Shuttle. (credit: Hughes Space and Communications, 1985) |
The lander idea that had been in Rosen’s head since the early 1960s but had never been put into practice was, in Rosen’s words, “an elegantly simple design that can be implemented quickly and inexpensively”: a spinning lander.
The spinning lander concept starts with a classic dual-spin spacecraft architecture, where the spinning module provides robust gyroscopic attitude stability, a relatively benign thermal environment (by evenly distributing heat loads) and centripetal acceleration (for effective propellant settling and flow control), connected to the despun module via the bearing/rotor assembly. The despun module typically hosts the telecommunications payloads and related antennas.
What converts this proven, robust, scalable architecture to a lander is the addition of landing legs to the despun section, plus some sort of landing radar (or equivalent) and mission-specific equipment such as science instruments, sensors, and technology or commercial payloads.
 Rosen’s spinning lander concept. (credit: SCSG, 2008) |
Most core spacecraft subsystems needed for a spinning lander—power, telemetry and command, telecommunications, attitude control, despun and spun module control, propulsion, etc.—are nearly identical to those designed into over a hundred successful dual-spin spacecraft missions conducted from 1969 through 2003. For nearly 40 years, Rosen and team developed a variety of technologies and design techniques that demonstrated the scalability of the basic architecture and subsystem capabilities, and compatibility with most available launch options. These innovations helped to accelerate progress in the burgeoning geostationary telecommunications satellite market. Several solar system-exploration spacecraft also employed the dual-spin architecture: Pioneer Venus Orbiter and Multiprobe (two spacecraft, both launched 1978), Sakigaki, Suisei, and Giotto (Halley flyby spacecraft, 1985) and Galileo (Jupiter orbiter, 1989).
| The lander idea that had been in Rosen’s head since the early 1960s but had never been put into practice was, in Rosen’s words, “an elegantly simple design that can be implemented quickly and inexpensively”: a spinning lander. |
For venturing beyond the GEO arc to the Moon and beyond, spinning lander operations during launch, Earth escape, cruise, and target approach are essentially the same as any typical dual-spin mission to GEO. Control of spacecraft velocity, spin rate, and attitude is accomplished via relatively simple and independent sets of thrusters: axial (parallel to spin axis), radial (normal to spin axis), and tangential (to spinning section rim). In free space, bulk spin rate of the spacecraft is controlled with the tangential thrusters, while relative spin rate and azimuth phase control between the despun and spun sections is accomplished with the bearing/rotor assembly, which passes power and signals across the interface via a series of slip rings. Telecom antennas, scaled to meet mission objectives, can be mounted to both sections, though the higher gain antenna(s) are almost always on the despun section.
During the terminal landing phase, the spinning portion of the lander continues to spin until touchdown, providing significant gyroscopic stability to the entire landed system. Before touchdown the despun section (with legs) is set to zero spin, allowing the legs to perform much like any typical set of lander legs does during landing. Importantly, because of its gyro stiffness, this system essentially can’t tip over during landing, but will rather “bounce” or “stick” depending on the leg system design.
Depending on mission goals, once on the surface the spacecraft’s spinning section can either be stopped or left to spin at any desired rate via the rotor controller. In the spinning mode, the entire lander becomes an excellent hopper as well, providing extended range and coverage options, onboard propellant permitting. Selected instruments on the despun section can be controlled independently in azimuth and elevation during all mission phases using typical pan-tilt assemblies. Instruments and components on the spun side can be positioned in azimuth by rotation of the entire spun module.
The mass-efficient, cost-effective spinning lander system designs can, for relatively low total mission costs, address mission objectives for planetary exploration, resource utilization, and commercialization at various solar system destinations. Solar system mission capability is enabled primarily by how much onboard delta-V capability is incorporated (via some combination of liquid monopropellant, bipropellant, and/or solid kick motor systems) and available power (via spun- and despun-mounted solar arrays or radioisotope-based power generators).