|
|
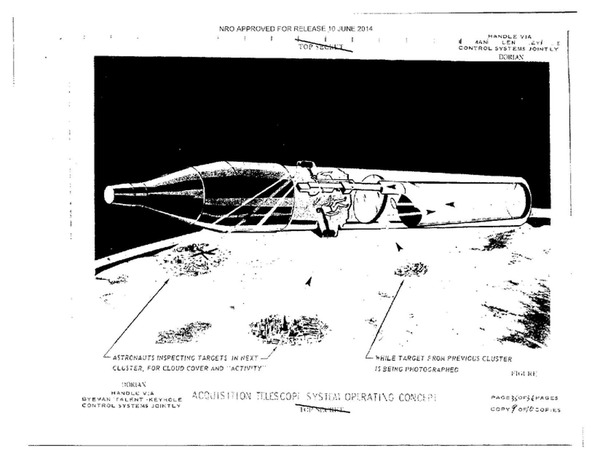 Illustration of the MOL in orbit, performing reconnaissance activities. (credit: USAF) |
Heavy glass: The KH-10 DORIAN reconnaissance system
by Dwayne A. Day
Monday, July 21, 2014

In the mid-1960s, an American reconnaissance satellite overflew the Soviet submarine construction facility at Severodvinsk and got lucky: a Soviet submarine was out of the water, up on rails, and in plain sight, providing a rare view of its propeller. Normally when submarines are in the water their propellers are not visible, and knowing the number of blades on a propeller is useful information for knowing how fast a submarine is moving. Sonar operators on ships or other submarines can count the number of times the blades beat the water and estimate a vessel’s speed. So this photo was a real coup. Not too long after it was taken, it was used by an instructor who was then training Air Force astronauts. He showed it to them as an example of the kind of opportunities that they might find as they orbited the Earth, peering down on the Soviet Union.
 |
Such “targets of opportunity” were a key justification for the existence of the Manned Orbiting Laboratory (MOL) program of the 1960s. Although American robotic reconnaissance satellites had been operating since August 1960, some people in the US military and intelligence communities believed that astronauts could play an important role in reconnaissance. Although MOL started out as a general-purpose experimental space station, it soon evolved into a spacecraft with an operational—and highly classified—reconnaissance mission.
Each MOL mission would launch atop a powerful Titan IIIM rocket from Vandenberg Air Force Base’s Space Launch Complex-6 (or “Slick-6”) into a polar orbit that would repeatedly take it over the Soviet landmass, which of course contained prime reconnaissance targets. The astronauts would look down on Soviet territory and operate the powerful KH-10 DORIAN reconnaissance camera, which was able to spot, and photograph, objects on the ground as small as a softball.
Now that new documents have been declassified on the DORIAN reconnaissance mission and the MOL internal layout and equipment, it is possible to begin to understand how the MOL astronauts would perform their mission. However, MOL was a complicated system in many ways, and it will be a while before we fully understand how it would have worked had it ever flown in space.
 |
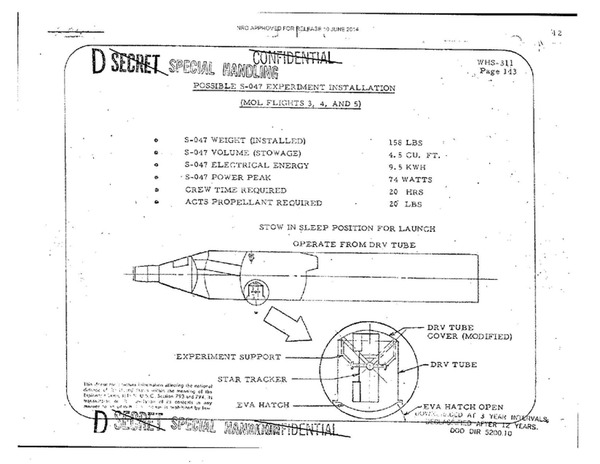
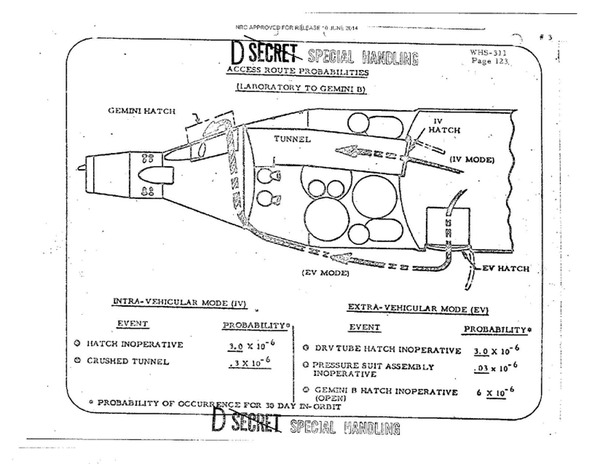
MOL was capped with a Gemini B spacecraft, a variant of NASA’s successful “Gusmobile” (after Gus Grissom, who was instrumental in its development and commanded the first Gemini mission). The Gemini B was cramped, offering only a few places for stowing reconnaissance film at the end of the mission. In addition to the Gemini B, the MOL astronauts had another means of getting film back to Earth. The pressurized MOL module had a small airlock. Inside that airlock was a reentry vehicle. The astronauts could open the inside hatch, put film into the reentry vehicle, attach a retro-rocket to the capsule, close the hatch, open the outside hatch, and launch the reentry vehicle toward Earth. Although no details on this reentry vehicle are yet available, it would not have been identical to the reentry vehicles regularly used for CORONA and GAMBIT reconnaissance satellites, because those were completely assembled on Earth and were not designed for human interaction once they were integrated into the spacecraft. However, it probably would have used the same aerial catch recovery method that the United States Air Force had perfected with the CORONA program. The hatch in the MOL could also be used for contingency EVA operations such as reaching the Gemini, although that would have required depressurization of the entire MOL spacecraft. It also would have been risky for astronauts operating outside the spacecraft without the extensive handrails and other supports that are considered vital for modern EVA operations.
 |
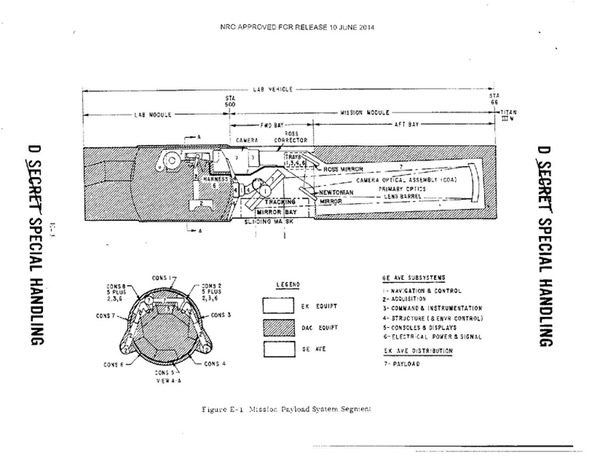
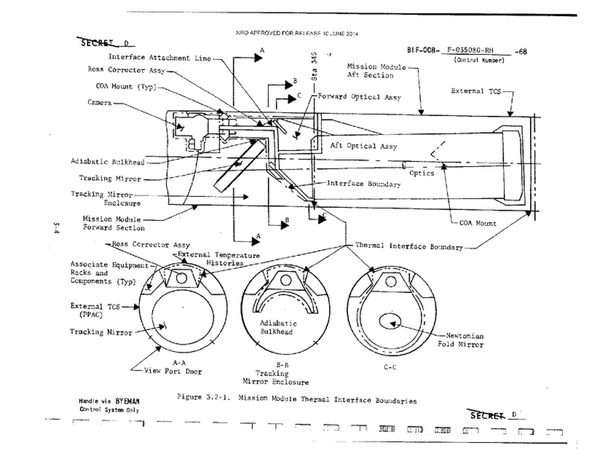
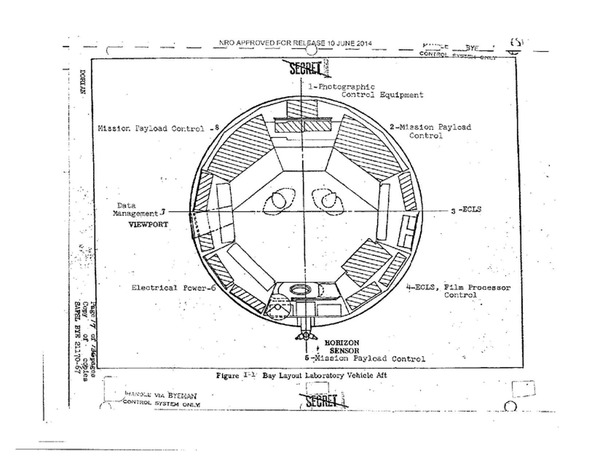
The heart of the MOL’s mission was the KH-10 camera system. But like all of the declassified Cold War era reconnaissance systems, the big primary reconnaissance camera was augmented with many additional cameras. Robotic spacecraft included cameras that photographed the Earth’s horizon, which provided precise data on how the spacecraft was oriented—for instance, was it pointed straight down or off to one side? They also had stellar cameras that looked up and photographed the stars, providing location data. They often had “terrain” or mapping cameras that took wider field of view images to enable photo-interpreters to look at a big picture image and then compare the reconnaissance photos to know precisely where they were looking.
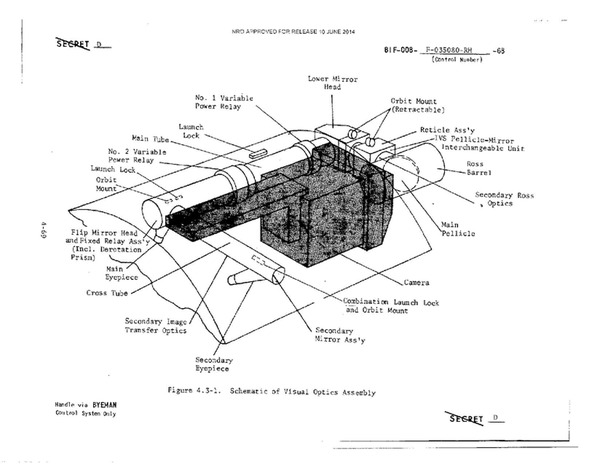 |
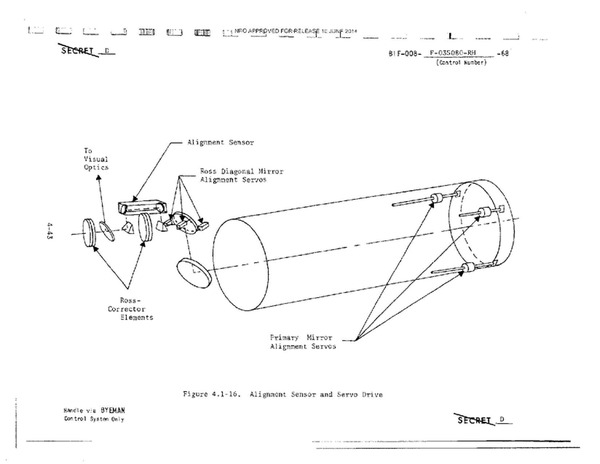
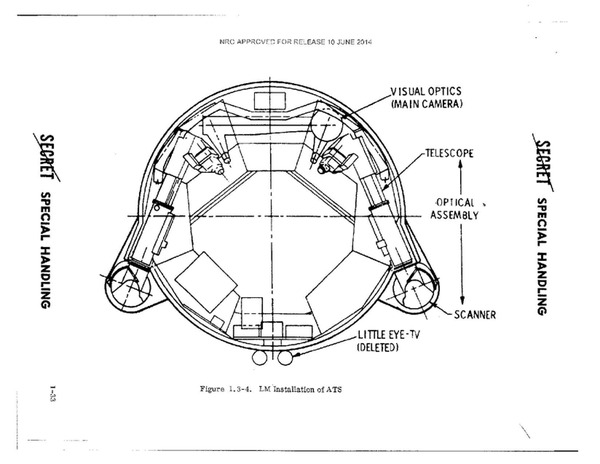
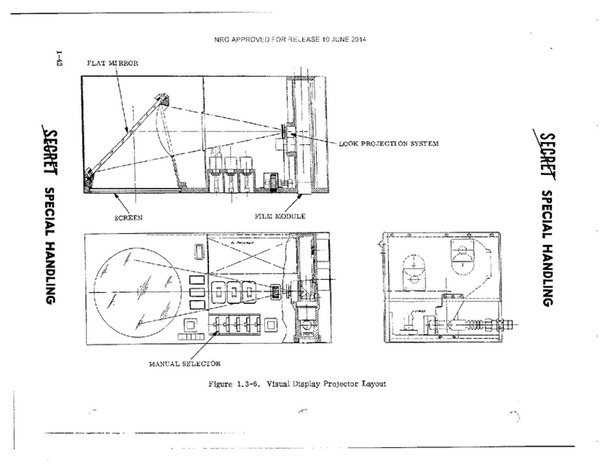
But MOL had some unique requirements. The astronauts needed to see not only what the big optical system was seeing at that moment, but also what potential targets were coming up. MOL therefore had two acquisition optical systems, one per astronaut. The astronauts would work side by side, with their backs towards Earth. Each could peer through his own eyepiece that showed the terrain coming up ahead, as well as through another eyepiece that showed what the KH-10 optical system was seeing at that precise moment. These acquisition optics essentially looked over the astronauts’ shoulders to the ground below. The KH-10 had a primary and secondary eyepiece so that each astronaut could see the powerful view of the ground, good enough to see people walking on a city street.
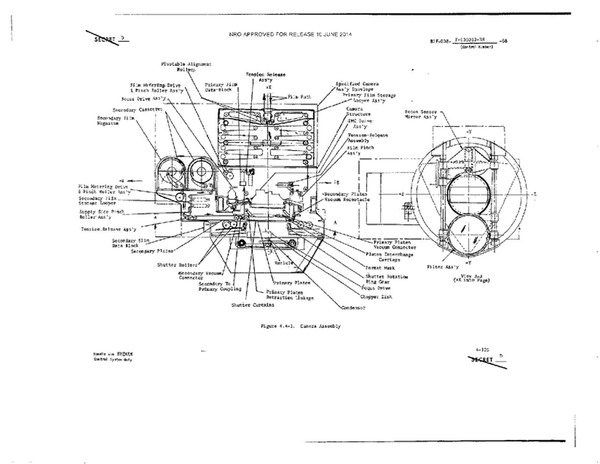 |
Although the astronauts could report some of what they saw directly to the ground, this was not an ideal way to operate. After all, much of the time they would be out of radio communication with the ground. Instead of observing, their job was to operate the camera system. The KH-10 had a large format film camera that was mounted between the two astronauts’ work station, at their lower leg/feet level. Although available documentation does not reveal the film width, it was probably from nine to twelve inches (22.5 to 30 centimeters), with nine inches being a common reconnaissance camera film width. They had film supply and takeup spools that they could remove as needed.
 |
What is still unknown is exactly how the astronauts would go about their mission. Like reconnaissance pilots, they would undoubtedly be well versed on their flight plan, knowing what areas they were going to overfly and what targets they would be able to see. But how would they get this information during the mission? Would they have three-ring binders with maps and target coordinates? How would they know their location over the Earth and how would they point the camera at a specific location? Would they only point the KH-10’s image reflecting mirror at a target, or would they also use gas jets to roll the spacecraft back and forth depending upon the target location? And how would the spacecraft location information be recorded on the film when the astronauts took a photo? These requirements were solved for other robotic reconnaissance spacecraft. Some of them, like the massive KH-9 HEXAGON, which was nearly as big as the MOL, included increasingly sophisticated precision location equipment.
 |
At least part of the justification for MOL was that astronauts could determine if targets were covered with clouds and therefore not worth photographing. Some robotic reconnaissance missions had returned from space with nearly half of their targets covered by clouds, and a key driver for the development of military meteorological satellites was to indicate if targets in the Soviet Union were free of clouds so that ground controllers could hurriedly send commands to the spysats to take a photo or skip it entirely. But as robotic reconnaissance systems were perfected, and as they were launched on increasingly larger rockets, their designers simply packed them with more film. As one photo-interpreter later explained, if the target was important enough, they took the shot; better to waste a little film and perhaps get lucky with a hole in the clouds. Film proved to be much cheaper than the complicated systems required to keep astronauts alive to press a shutter button.
 |
MOL was canceled in summer 1969. Some of the MOL astronauts eventually got to fly in space. But their chariot, the complicated Manned Orbiting Laboratory, never got its chance to prove it could work.
Dwayne Day can be reached at zirconic1@cox.net.
|
|