Diamonds and DORIANS: program troubles, operations, cancellation, and legacy (part 3)by Bart Hendrickx and Dwayne A. Day
|
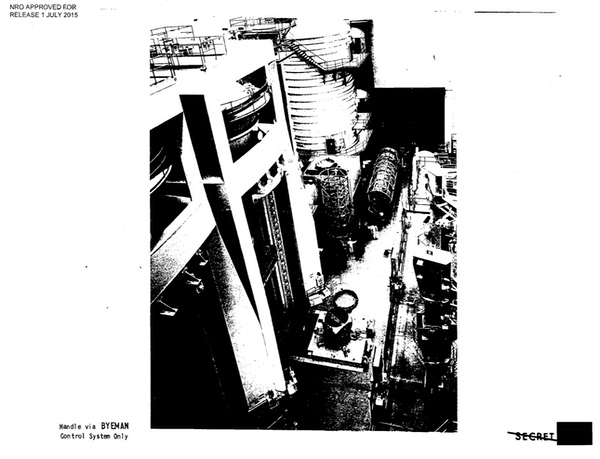
 MOL components had to be moved around the country. The optical system would have had to be flown from New York to California for integration with the pressurized laboratory module. (credit: NRO) |
In early 1966, General Bernard Schriever, who had become famous as the father of the American ICBM program but by the mid-1960s had duties that included Director of the MOL Program, called for a fast-track study of “the role of man in MOL.” The purpose of the study was to determine what value astronauts added to a mission that could be conducted robotically. Schriever recommended that MOL astronauts Al Crews and Richard Truly be consulted for the study, and also suggested that it could include NASA astronauts James Lovell, Ed White, and Wally Schirra. None of these astronauts’ names are listed on the final report, although they might have contributed.
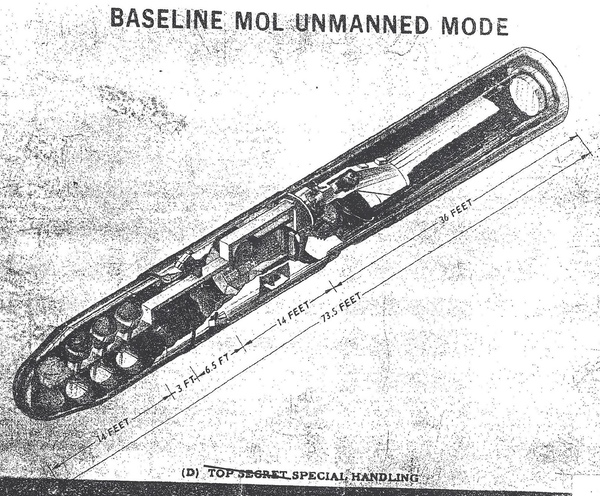
Schriever ordered the study because a high-level advisory group was pushing for an “unmanned MOL” version in addition to the manned version. If MOL could be operated unmanned, it called into question why the manned version was required at all. In May 1966, at the recommendation of the reconnaissance satellite advisory committee, the MOL program added an unmanned reconnaissance capability. This entailed adding a different front end with eight reentry capsules that would take the place of the pressurized module and the Gemini spacecraft. It also required that the spacecraft be designed to operate on its own. That added significant complexity to the overall system design and to the program, which now had to manage not only the systems to support astronauts in space, but also all the robotic systems as well. It also added cost, because the program was now developing two spacecraft variants instead of one.
| If MOL could be operated unmanned, it called into question why the manned version was required at all. |
The study got underway in February and was finalized by May 25, 1966. The study group was chaired by Colonel Lewis S. Norman, Jr., with Lt. Colonels Stanley C. White, Benjamin J. Loret, and Arthur D. Haas of the MOL Program Office, and Major Kenneth W. Weir of the MOL Systems Office. White was a flight surgeon and familiar with the limitations of the human body. The report’s authors stated bluntly that “at the outset it was clear that there has been, is, and will continue to be, a need for a continuously updated rationale supporting the essentiality of man to MOL mission success.” They continued: “it must be anticipated that considerations of economy and the shifting international political situation, when viewed at the highest policy levels of government, will generate pressure dictating a periodic requirement to reassess the approach to the MOL program, even though the program currently provides for both manned and unmanned capabilities.”
The report’s authors talked to a lot of people throughout the MOL program and heard many different viewpoints. They spoke to engineers, managers, and MOL astronauts, among others. They thought that they got honest opinions and nobody was withholding information from them.
“Prior to initiation of this study, the consensus of the study group was that the rationale for including man in the MOL seemed to have deteriorated since program approval in August 1965,” they acknowledged. The reason was that new technology developments apparently threatened the original argument for MOL that a manned system could achieve very high resolution photography, but an unmanned system could not.
Perhaps what had people involved in the MOL program nervous was the impending debut of the GAMBIT-3 high-resolution photo-reconnaissance satellite. The first GAMBIT-3 launch took place in July 1966, several months after the report was completed. But by early 1966 the people involved in the technical aspects of MOL would have been aware of its optical system which had been considerably upgraded compared to the GAMBIT-1 that had already been in operation for nearly three years. The upgrades included a larger diameter mirror and longer focal length. Although the resolution goal for the initial GAMBIT-3 missions is classified, it was probably around 30 centimeters (12 inches), whereas the goal for MOL’s DORIAN optical system was 10 centimeters (4 inches).
After conducting their review, the study group became convinced that the argument for man was stronger than before. They sought to explore and explain the various reasons they believed that astronauts were still important for MOL.
The authors of the report concluded that any unmanned high-resolution reconnaissance system would have a high initial failure rate. This might not be a complete loss of the spacecraft or failure of the camera, but an unmanned system would not initially meet the goal for high-resolution photographs. They believed that inclusion of man “will virtually guarantee” earlier achievement of the resolution goal. “The underlying reasoning for this conviction is based on the inherent capability of man to more nearly guarantee a high probability of mission success—man’s inherent ‘reliability’—as opposed to that provided by automatic equipment.”
The report authors believed that probability of mission success for a manned mission was high from the start, and would stay high, but would start low for unmanned missions and would only increase over time with launches, with a low initial improvement rate. They also concluded that an unmanned spacecraft would have a lower level of mission success than the manned MOL, no matter how many missions were flown, and would never equal the success rate of the manned version.
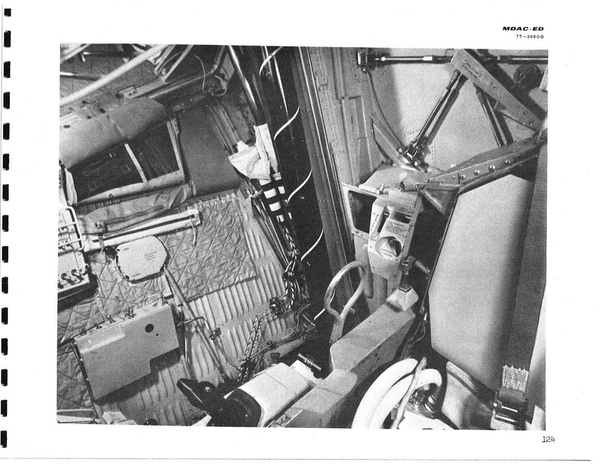
 The two MOL astronauts would have limited room inside their spacecraft and would have worked at a console that had an optical system that looked directly outside the spacecraft, as well as connected to the large DORIAN optical system. (credit: NRO) |
The study authors also argued that it could make sense to use the unmanned system for operational missions after the system had been perfected with astronauts aboard. At that point the program could transition to a mix of manned and unmanned MOL reconnaissance missions. “Unmanned proponents argue that unmanned program experience and application of effort and quality control methods approaching those used in man-rating manned systems would insure early achievement of a reliable unmanned system, and that an unmanned program is more cost-effective over the life of an operational program.” But manned spaceflight proponents disagreed that unmanned systems would ever approach that level of reliability. They argued, for example, that man is “self-healing” and would not repeat a particular mode of failure. Astronauts were also “adaptable” and could find ways to work around a problem. Machines could do this too, but only for predicted failure modes. They argued that man’s performance does not degrade in a simple statistical manner but remains high.
The authors believed that by 1966 there was sufficient data available on both manned and unmanned spacecraft that actual statistical comparisons could be made. They suggested that it would be possible to look at data that NASA had already collected and was being used to establish contract incentive fee performance awards for McDonnell, which built the Gemini spacecraft.
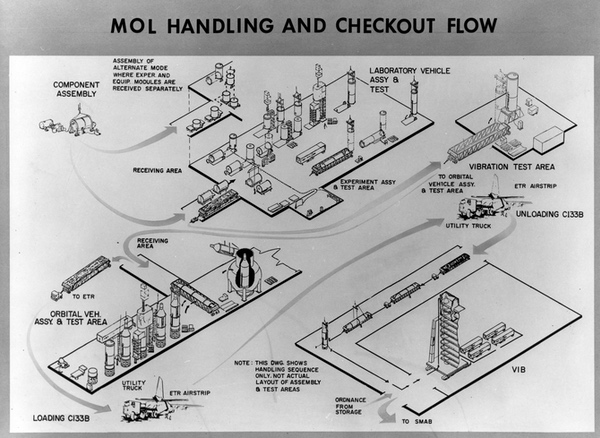 MOL had multiple components that all had to be integrated and checked out in California prior to shipment to the launch site. (credit: NRO) |
In addition to achieving mission success faster than an unmanned system, “we believe that any DORIAN system growth to provide a capability for resolution approaching the atmospheric limit will require man’s presence,” the authors wrote. The atmospheric limit for a reconnaissance camera in low Earth orbit—dictated by immutable physics—is about six centimeters ground resolution. The authors did not believe that such very high resolution was possible with an unmanned system.
| One of the recurring themes apparent in the report is that the authors believed that the manned MOL was perpetually requiring justification. |
The report acknowledged that the cost of developing a manned system was quite large compared to the cost of the camera system. But the cost of the camera was not negligible, and in order to get the best return on investment, it made sense to extend mission operations as long as possible. The solution might be to make the MOL system serviceable by multiple astronaut crews.
The authors sought to break down all the relevant areas where humans offered greater capability over automated systems. They noted that “specific functions and capabilities were originally considered to represent man’s most important contributions in the conduct of the DORIAN mission.” They were:
The authors addressed several other subjects including the astronauts’ ability to adjust equipment in order to do things like compensate for haze over a target, their ability to take over if a spacecraft lost control, and their ability to conduct assembly and maintenance. For the latter, they thought that the astronaut’s contribution would be relatively minor, because most critical systems would have to be designed with high reliability from the start.
The authors also acknowledged that there were good and bad ways to use astronauts in a spacecraft. For example, an astronaut could be given trivial tasks merely because he was available and an engineer might use the astronaut as a shortcut rather than designing a better system. Doing this could lessen the astronaut’s capability for optimum performance of important mission tasks. They had learned from NASA that astronauts were sometimes given non-essential tasks simply because they were in the spacecraft.
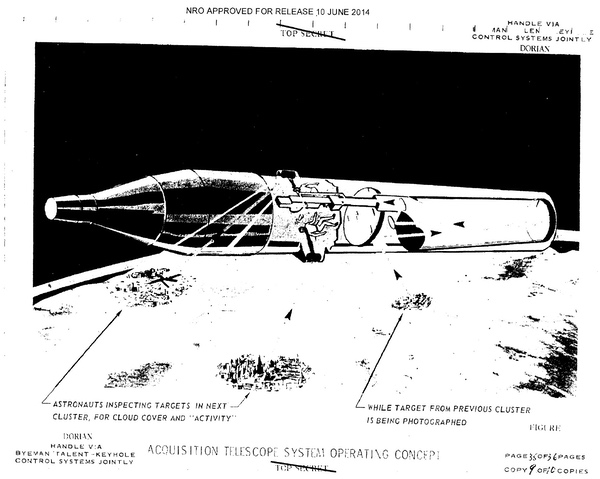 The MOL astronauts would have used spotting scopes to look ahead of the ground track for the spacecraft and determine if the large optical system should photograph specific targets. (credit: NRO) |
At the time, the MOL program had only eight astronauts and the authors concluded that the program was not using them properly. They were spending three days of every week at Aerospace Pilots School, meaning that they were not working for the program during that time. “We should investigate procedures used by NASA to insure astronaut input into systems design,” they wrote. Eight crewmembers are “too few to cover in depth all areas in which they should be actively engaged” and they suggested that the next astronaut selection be done earlier in order to bring more people into the program to assist with human-machine interface issues.
There were other areas where the MOL astronauts had expressed concern about current plans for the spacecraft. For example, they noted that the umbilical hose was not long enough to permit external access to the entire vehicle during a spacewalk. In addition, the plan at the time was for a black and white TV display for selecting targets for the DORIAN camera system. But the astronauts believed that a direct optical acquisition scope, which would allow them to view the targets in color, was a better approach. This required a tradeoff to see which was better. Ultimately, program managers chose a direct optical scope.
The study participants also thought that the program could benefit by including current NASA astronauts in engineering design. The best approach would be to provide one or two NASA astronauts with security clearances so they would have access to the entire program. But apparently this idea had already met some opposition. “We believe reluctance to grant clearances to NASA astronauts might be overcome by proposing to select only those who are no longer considered by NASA to be active candidates for orbital flights, e.g. astronauts Slayton and Sheppard.” But they concluded that no matter which NASA astronaut was ultimately chosen, this was very important and a method should be found to include NASA astronauts as advisers to MOL. “It is inconceivable that we should overlook this unique source of experience.”
The report’s major recommendation was for a comprehensive study comparing the capabilities and reliability of manned and unmanned MOL vehicles. The authors believed that there was sufficient data on both types of space vehicles to make a detailed analysis, and this should be undertaken immediately. According to other records, that work began even before the study was finalized.
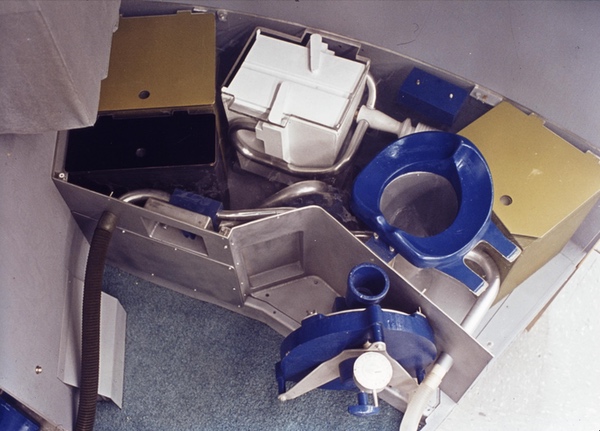 MOL was planned to be a long duration spacecraft capable of supporting astronauts for a month. This required new life support systems, such as a toilet. (credit: NRO) |
One of the recurring themes apparent in the report is that the authors believed that the manned MOL was perpetually requiring justification. Although MOL was not even a year old, they believed that this argument would continue for the rest of the program. They even suggested that the program office create a periodic review process to continually update the justification for including astronauts in the program. But although they thought there was a solid justification for military astronauts, the report conveyed a tone of mild defensiveness, as if they were resigned to eventually lose to the unmanned MOL. New developments in robotic reconnaissance systems—notably the impending launch of the first GAMBIT-3 high-resolution reconnaissance satellite only a few months after the report was finished—were eroding the justification for having a man controlling the camera on a big spacecraft.
According to Lew Allen, who worked in the NRO’s West Coast program office and eventually rose up through Air Force ranks to become a general by the 1970s, the decision to build an unmanned MOL was a bad decision that forced compromises on the design that ultimately led to MOL’s demise. However, there are many other indications that MOL’s problems were bigger than that, including a development cost that was more expensive than planned even before the unmanned MOL was added to the program.
One bit of foreshadowing in the report was a reference to concerns about MOL expressed within the President’s Science Advisory Committee. PSAC was a high-level advisory group that had played a major role in numerous important intelligence and military decisions since the 1950s. PSAC had previously made recommendations on satellite and ICBM programs. The reference was probably to a reconnaissance advisory committee led by Edwin “Din” Land, the president of Polaroid. Land’s committee had already recommended the unmanned MOL, and it could provide recommendations to PSAC. Over the next few years, Land would become a strong advocate of a near-real-time imaging system supported by the CIA, and a thorn in the side for the NRO’s West Coast office, which was responsible for many programs, including MOL. Although no PSAC reports about MOL have been declassified, if PSAC’s members were already skeptical of MOL, MOL’s program managers would have been worried, because PSAC could potentially speak directly to President Lyndon Johnson.
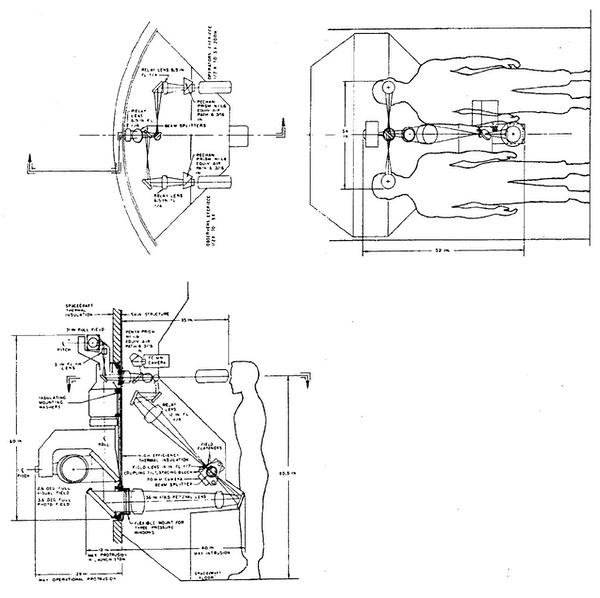 The two MOL astronauts would have limited room inside their spacecraft and would have worked at a console that had an optical system that looked directly outside the spacecraft, as well as connected to the large DORIAN optical system. (credit: NRO) |
NASA’s Gemini flights were then underway, demonstrating the versatility of astronauts in low Earth orbit. MOL would use a version of the Gemini spacecraft, which made program officials acutely interested in NASA’s ongoing missions. But the timing of the report may have also affected its conclusions. The report mentioned the Gemini 6, 7, and 8 missions as important demonstrations of the value of an astronaut in space, stating that “anything man has been able to do in aircraft from a military mission standpoint he can do in orbit.” When a thruster on Gemini 8 malfunctioned, the astronauts were able to overcome the malfunction, although the mission ended.
| When the program was approved in August 1965, its budget was $1.5 billion. By fall of 1967, the cost had ballooned to nearly twice that amount. |
But in June 1966 Gene Cernan experienced major problems performing a spacewalk during the Gemini 9 mission. Cernan was supposed to conduct tests of an astronaut maneuvering unit that was originally an Air Force project that could have been tested on MOL, but he became overheated in his spacesuit and could not conduct the tests. This event demonstrated some of the limitations of human spaceflight—humans did not always solve problems, sometimes they became the problem. In July 1966, Mike Collins performed EVAs on Gemini 10 with fewer difficulties, and by the end of the Gemini program EVAs were well understood. But these events demonstrate how the timing of the MOL report could have affected its conclusions—Gemini 8 had demonstrated that an astronaut could save a spacecraft in trouble, but Gemini 9 showed how an astronaut could prevent a mission from being accomplished.
The MOL program office quickly began implementing many of the recommendations in the report and throughout 1966 and into 1967 program managers, with the assistance of an enlarged MOL astronaut corps, began conducting simulations and modeling of the astronauts’ ability to maximize the potential of the Manned Orbiting Laboratory and its DORIAN camera. By fall 1967, the program revisited the question of the value of astronauts aboard a manned reconnaissance spacecraft, and this time they had charts and graphs to back them up.
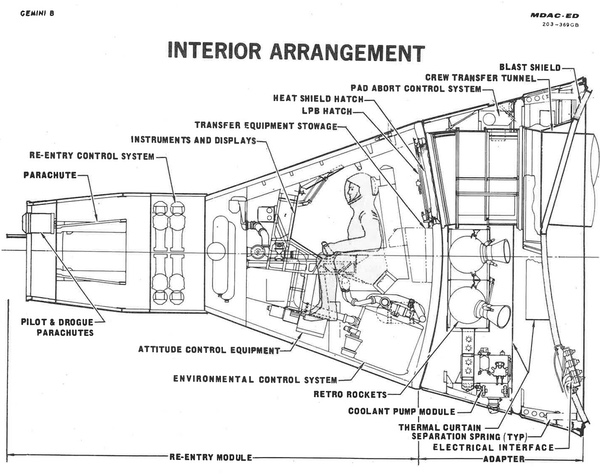
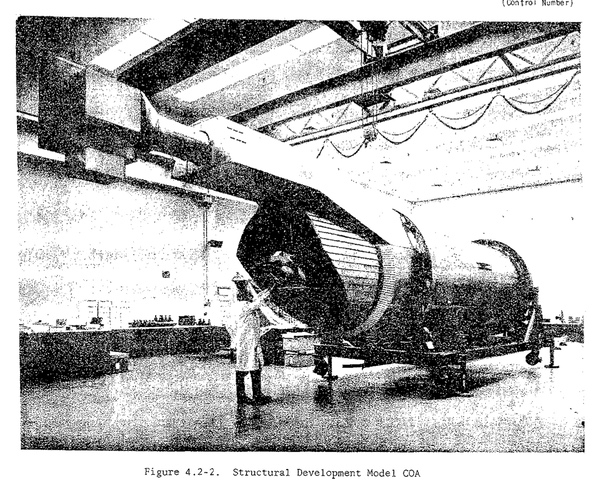
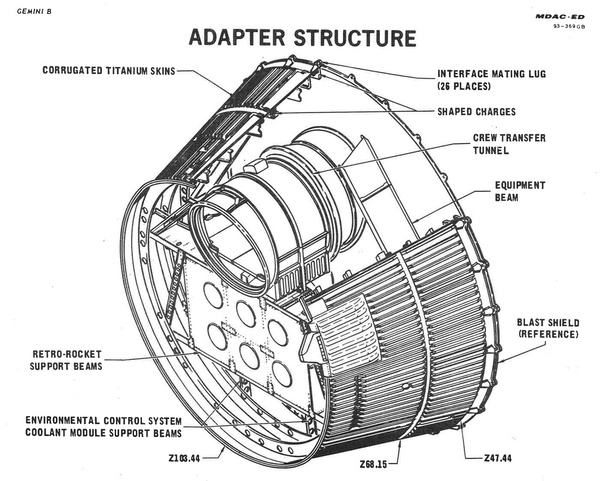
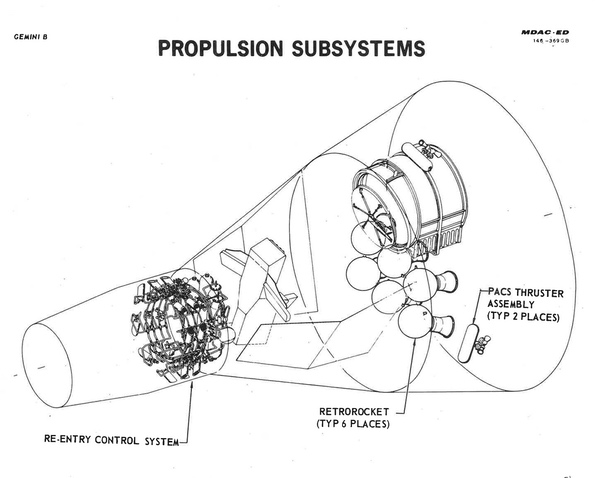 The Gemini B, unlike NASA's Gemini spacecraft, had no requirements for rendezvous and docking. It was equipped with a retrorocket system for reentry. (credit: McDonnell Douglas) |
MOL started out in June 1965 as a plan for six manned flights of the Gemini spacecraft with the MOL laboratory and its DORIAN optical system. But by May 1966, an unmanned version of the spacecraft was added to the program and the number of manned flights was reduced to only three, with two unmanned qualification flights and two robotic reconnaissance flights. The manned part of the Manned Orbiting Laboratory was quickly eroding away over the lifetime of the program.
According to a program chronology, this was the MOL/DORIAN program between mid-1965 and December 1967:
| PROGRAM | TOTAL COST | SCHEDULE |
|---|---|---|
| 28 June 1965 1 unmanned 6 manned | $1.653 billion | First flight late 1968 Last flight early 1970 |
| 24 August 1965 1 unmanned 5 manned | $1.500 billion | First manned flight late 1968 |
| 25 August 1965 (LBJ’s announcement) 1 unmanned 5 manned | $1.500 billion | Unmanned flight 1968 First manned flight late 1968 |
| 23 May 1966 2 qualification 3 manned 2 unmanned | $1.750 billion | First qual flight April 1969 First manned flight Dec. 1969 Compatibility model camera |
| September 1966 2 qualification 3 manned 2 unmanned | $1.749 billion | First qual flight April 1969 First manned flight Dec. 1969 |
| December 1966 2 qualification 3 manned 2 unmanned | $1.970 billion | First qual flight April 1969 First manned flight Dec. 1969 |
| June 1967 2 qualification 3 manned 2 unmanned | $2.350 billion | First qual flight April 1970 First manned flight Dec. 1970 |
| Oct/Nov 1967 2 qualification 3 manned 2 unmanned | $2.939 billion | First qual flight Jan. 1971 First manned flight Oct. 1971 |
| December 1967 2 qualification 3 manned 2 unmanned | $2.807 billion | First qual flight Dec. 1970 First manned flight Aug. 1971 |
The requirement for operating in unmanned or “automatic” mode that was issued in May 1966 changed the overall mission plans over time. By late 1967 the plan was to launch only three manned missions out of a total of seven. The program thus had 17 astronauts for a total of only six seats. (One MOL astronaut left the program in July 1966, another returned to the Navy in April 1968, and a third was killed in a plane crash in December 1967.)
When the program was approved in August 1965, its budget was $1.5 billion. By fall of 1967, the cost had ballooned to nearly twice that amount and it was clear to the program managers that the program was spending money far above its appropriated rate. They would either have to obtain more money or readjust their schedule and goals.
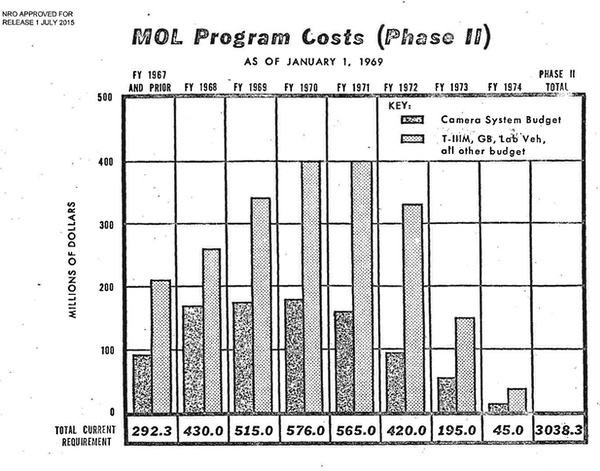 The Manned Orbiting Laboratory was an expensive program. Whereas other reconnaissance satellites generally had optical systems that cost more than half the total program cost, the DORIAN system cost perhaps a third of the MOL program cost due to other costs such as those associated with the astronauts. (credit: NRO) |
In 2015, after the program was declassified, former MOL astronaut Lt. Gen. (ret.) James Abrahamson publicly stated that in early 1968 the deputy director of the MOL program, Major General J.S. Bleymaier, asked the MOL astronauts for their advice about the program’s goals. Abrahamson said that the astronauts told Bleymaier to promise that MOL would be fully operational on its very first flight. Presumably this meant eliminating the two qualification flights.
Abrahamson said that his recommendation turned out to be a mistake, because it caused the schedule to slip by nearly a year. The first launch would no longer be the December 1970 unmanned demonstration spacecraft, but would now be the first manned flight taking place in August 1971. In 1969 the MOL launch schedule slipped even more, Abrahamson said. He explained that while serving as deputy administrator of NASA in the early 1980s he learned an important lesson that MOL should have followed: it is better to launch something, even a tin can, than to sit on the ground trying to maximize a mission. MOL was sitting on the ground and with the first launch constantly slipping, its credibility was diminishing and its political support was eroding.
| The civilian MOL proposals were never seriously considered by NASA, but they did result in the production of public artwork which even today has been misconstrued as the actual MOL reconnaissance spacecraft. |
Throughout most of 1968 the program was aiming for the August 1971 date. But very late in the year it became clear that Congress would not fully fund the defense budget and MOL/DORIAN funding took a hit. The first manned flight slipped to December 1971. By March 1969 the flight schedule was reduced from seven to six launches, but returned to the earlier plan for four manned missions and two unmanned missions, with no qualification flights. The program had a contract for four Gemini B spacecraft. The first manned launch slipped to approximately mid-1972. The total program cost had risen to $2.925 billion. Soon after the reshuffling, there followed a series of reevaluations and a new total cost estimate of $3.1 billion, over twice the amount that LBJ had committed to in summer 1965.
These schedule slips and cost increases were not happening in isolation. By early 1969 MOL and its DORIAN optical system were competing against another large and expensive reconnaissance satellite program known as HEXAGON. The two systems were not analogous—DORIAN would provide high-resolution images of tiny areas on the Earth whereas the robotic HEXAGON would photograph huge swaths of territory at lower resolution. MOL/DORIAN was primarily sponsored by the Air Force component of the National Reconnaissance Office whereas HEXAGON was a CIA-led system. Both spacecraft would use Titan III rockets, and both cost a lot of money at a time that the Department of Defense was spending heavily on the Vietnam War.
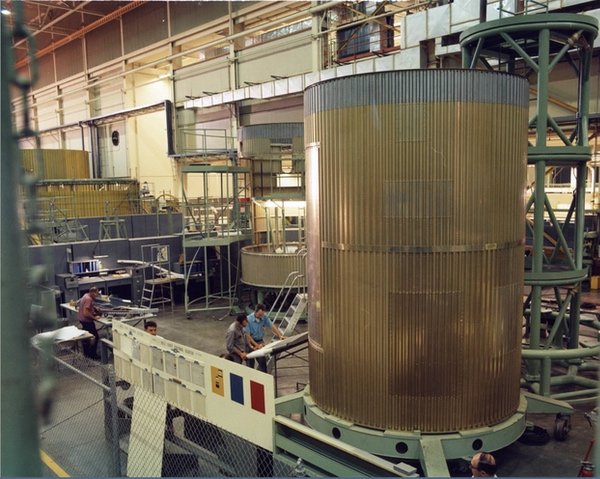
 Kodak’s Building 101 during the MOL development. This facility included major integration and testing equipment, and was probably the most well-equipped space optics facility in the world. Note the large cylindrical elements on the floor, which were probably intended to simulate MOL components for testing. (credit: NRO) |
In addition, in July 1966 the National Reconnaissance Office began operating the GAMBIT-3 (KH-8) series of reconnaissance satellites. These satellites had higher resolution than their predecessor and the NRO launched them at the rate of every two months, continually improving their systems and performance. Although the ground resolution of the GAMBIT-3 system at this time remains classified, it was constantly improving, and it was not difficult for intelligence users to envision the much cheaper GAMBIT satellites beginning to rival the MOL/DORIAN system by the time that the latter began flying in 1972. MOL served a niche set of requirements, and that niche was getting smaller every day.
During the later years of the program there were contractor proposals for a civilian MOL. These proposals were for an orbiting laboratory capable of accomplishing Earth observation as well as astronomy missions. They included advanced versions of MOL that involved docked spacecraft as well as on-orbit resupply and crew replacement. The proposals were in response to NASA’s ongoing Apollo Applications Program that sought to use Apollo hardware in Earth orbit for civilian scientific missions. The civilian MOL proposals were never seriously considered by NASA, but they did result in the production of public artwork which even today has been misconstrued as the actual MOL reconnaissance spacecraft.
 The structural model for the DORIAN optical system at Eastman Kodak in Rochester, New York, circa 1968. DORIAN was the largest space optics system up to that time, with up to 1,700 Kodak employees involved in its development. Its cancellation resulted in many firings at the company, which had to be done over many months to conceal the company's involvement in the classified part of MOL. Company leadership vowed to never take on such a large government program again. (credit: NRO) |
By mid-1968 there were calls to reorient, cut back, or cancel HEXAGON, which was increasingly expensive. When President Richard Nixon assumed office in January 1969, he ordered cuts to the defense budget. His head of the Bureau of the Budget proposed canceling HEXAGON, although Deputy Secretary of Defense David Packard had determined that canceling MOL was the better option—both satellite programs then cost about the same. In April 1969, Nixon ordered the cancellation of HEXAGON and approved taking MOL-DORIAN to completion.
| To do this without revealing that Kodak was involved in the MOL program—which would have indicated its reconnaissance role—the company fired 10 to 20 workers a week over several months, usually on a Thursday. |
Richard Helms, the Director of Central Intelligence, immediately asked Nixon to postpone the HEXAGON cancellation for two weeks. Helms and Packard then appealed to Nixon to reverse the decision. Their argument was that HEXAGON was far more vital than MOL-DORIAN to arms control monitoring, because it could photograph large swaths of territory, enabling the counting of weapons systems. MOL could only photograph small areas at high resolution. This technical intelligence was important for determining the characteristics of weapons systems, but it was not as vital as finding and identifying the weapons in the first place. Helms and Packard were aware that arms control was one of Nixon’s priorities when they made the case for HEXAGON. Nixon agreed to fund HEXAGON.
 By spring 1969, the plan was for the first MOL launch in summer 1972. When the MOL program was canceled in summer 1969, some engineering and test hardware had already been produced, although it is unlikely that significant flight hardware had been manufactured. Almost all MOL hardware was scrapped. (credit: NRO) |
In early May, the reconnaissance advisory panel chaired by Edwin “Din” Land recommended the cancellation of MOL and the development of an unmanned high-resolution satellite that used DORIAN-derived optics. Land’s committee also recommended diverting any savings to development of a near-real-time reconnaissance system. Nixon was convinced and formally reversed the HEXAGON cancellation and ordered the cancellation of MOL-DORIAN. Secretary of Defense Melvin Laird announced the cancellation of MOL on June 10, 1969. One MOL astronaut in Los Angeles heard about the cancellation on the radio as he was driving to work in the morning. Across the country, thousands of workers lost their jobs.
Whereas many of the contractors involved had public contracts with the Air Force, Kodak’s contract with the National Reconnaissance Office was secret, as was the MOL’s reconnaissance mission. More than 1,700 Kodak employees were working on MOL when the program was cancelled. Kodak moved up to several hundred engineers and technicians to its growing commercial copiers division, and sought to move others into its commercial film divisions. But the company still had to fire hundreds more. To do this without revealing that Kodak was involved in the MOL program—which would have indicated its reconnaissance role—the company fired 10 to 20 workers a week over several months, usually on a Thursday. According to one former employee, this destroyed morale and meant that Thursdays were unproductive days in the relevant Kodak departments, as hundreds of people waited to hear their fate, and then discussed who had gotten fired. An atmosphere of dread fell over certain parts of the company, and senior Kodak leadership vowed that the company would never again undertake such a large government project that could be cancelled at the whim of budget cutters.
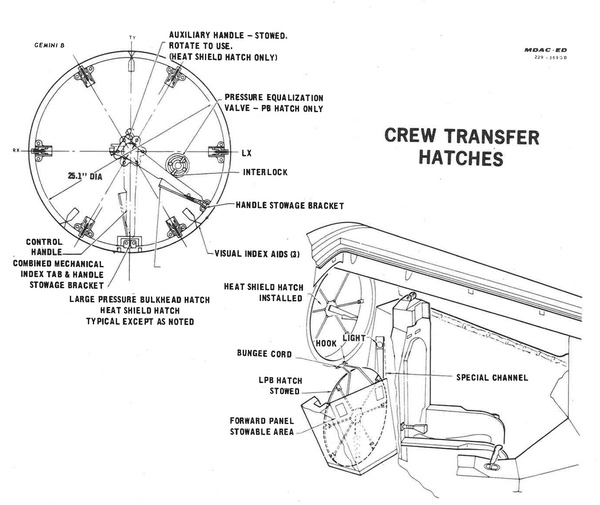  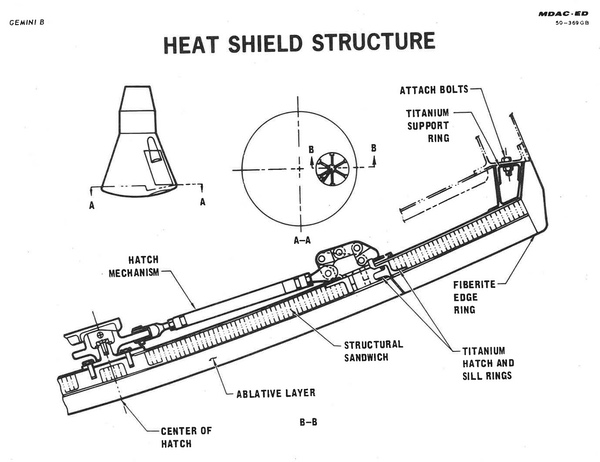 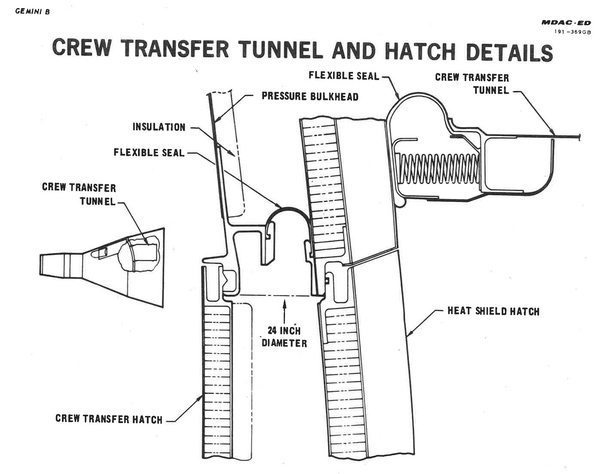   The Gemini B’s most unusual feature was a hatch through the heatshield for the astronauts to enter the laboratory. This was tested during a suborbital flight and worked well. The space shuttle also had hatches in its heatshield, and the design is no longer unusual. (credit: McDonnell Douglas) |
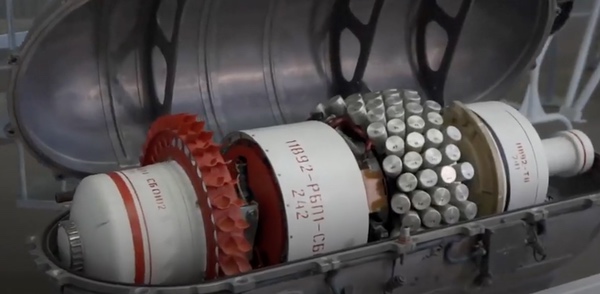
As the curtain fell over MOL in mid-1969, Vladimir Chelomei’s team was moving full steam ahead to get the first Almaz stations ready for launch in the early 1970s. The manned versus unmanned debate that had ultimately led to the demise of MOL was not yet a factor in the Soviet program at the time. By the late 1960s, Soviet automated reconnaissance satellites were still far from reaching a level of complexity that would place them in direct competition with Almaz. The station’s optical system was far superior to that of the unmanned satellites and was not designed to operate automatically. Moreover, Almaz was supposed to fulfill the role of several satellites at the same time by conducting observations in other regions of the electromagnetic spectrum as well. Last, but not least, the Soviet space program was organizationally structured in such a way that there was no clear distinction between civilian and military space programs, thus the value of having people do military work in orbit was not really put into question, at least not in the 1960s.
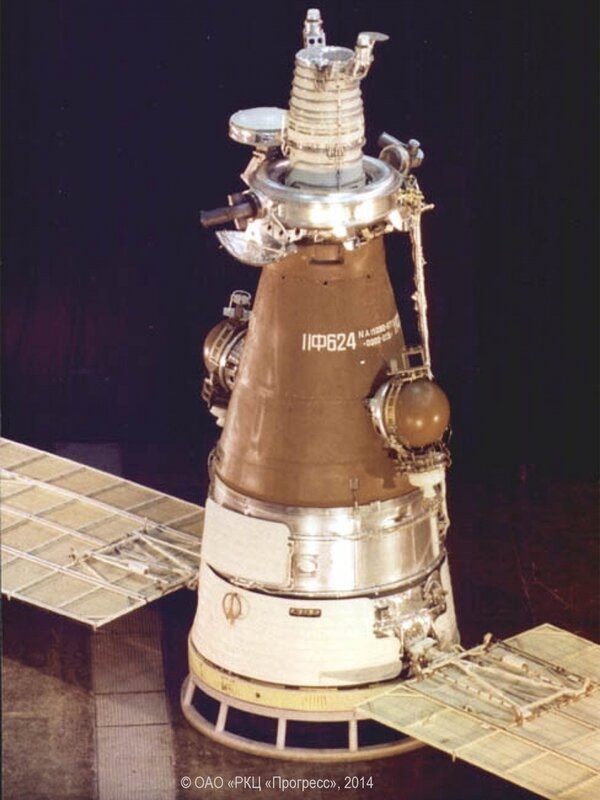
Despite the strong support for Almaz in the military community, designing and building a 20-ton space station and an equally heavy transportation system (TKS) proved to be more challenging than expected. Although it was decided early on to use Soyuz as an interim transport vehicle, the schedules laid out for Almaz soon turned out to be overly optimistic. A government decree issued on July 21, 1967, called for finishing the design in 1968, building the first flight-rated stations in 1968–1969 and reaching operational status in late 1970. In reality, all that had been manufactured by the end of the decade were a number of full-scale test models of the station.
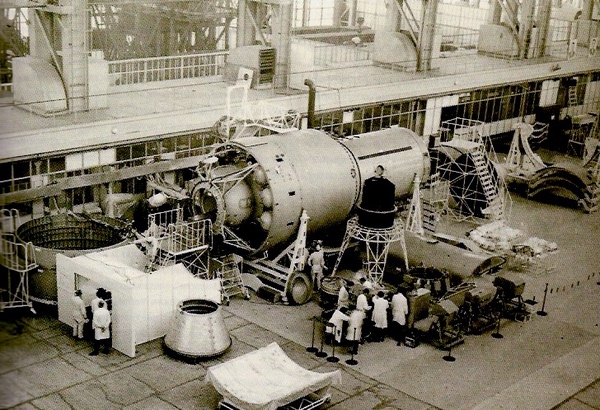 Almaz station under construction. (credit: NPO Mashinostroyeniya) |
Technical hurdles aside, Almaz was also competing for funding with other ongoing piloted space projects run by the rival TsKBEM design bureau of the deceased Sergei Korolev, now headed by Vasili Mishin. These were Soyuz (which at the time was primarily aimed at performing docking tests in Earth orbit), separate circumlunar and lunar landing projects (which used different hardware), and small military research vehicles (7K-VI/Zvezda and later Soyuz-VI). In late 1969, several months after Apollo 11 had beaten the USSR in the Moon race, a group of TsKBEM designers approached the country’s leadership with a proposal to build a civilian space station that would be based on Almaz but could be built more quickly by incorporating elements of the Soyuz spacecraft. This would give the Soviet space program a new impetus after the lost Moon race and make it possible to upstage America’s Skylab space station. The plan was approved by a government decree on February 9, 1970, and the first station, internally known as DOS (Longterm Orbital Station), was placed into orbit under the official name Salyut on April 19, 1971, more than two years ahead of Skylab.
| Despite the strong support for Almaz in the military community, designing and building a 20-ton space station and an equally heavy transportation system (TKS) proved to be more challenging than expected. |
The priority given to DOS had major consequences for Almaz. A significant portion of the workforce earlier engaged in Almaz was transferred to the DOS project, both at the Khrunichev factory that manufactured the stations and at a branch of Chelomei’s design bureau that had been given a key role in designing DOS. Not surprisingly, many within Chelomei’s design bureau felt that the Almaz design had essentially been stolen by their rivals of TsKBEM. On the positive side, DOS served as a pathfinder for Almaz, offering the opportunity to test various elements of the station as well as the modified Soyuz crew ferry (designated 7K-T).
New timelines for Almaz were outlined in a government decree on June 16, 1970. The first station (using Soyuz as a crew ferry) was now set for launch in the fourth quarter of 1971 and the TKS vehicles were to be introduced by the end of 1972. According to the 2019 Almaz history Ogranka Almazov, the military ultimately hoped to operate a constellation of as many as six Almaz stations with a lifetime of more than two years. The stations would operate in low orbits (around 220 kilometers) with inclinations of between 51.6 and 71 degrees (the latter inclination could only be reached by TKS, not Soyuz.) The 71-degree inclination orbits would make it possible to expand the ground coverage of the stations. Placing them into polar orbits like MOL was not possible due to the geographical location of the Baikonur cosmodrome and would also have made it necessary to significantly reduce their mass.
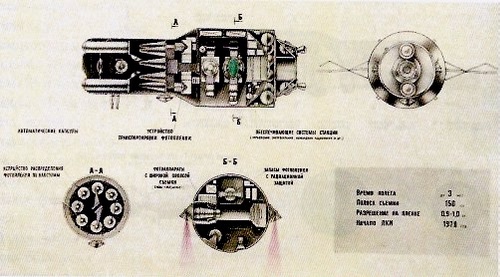
The standard mission duration for a single crew was expected to be three months (the design lifetime of the TKS vehicles), but could eventually be increased. As long as Almaz had only one docking port, permanent habitation was not possible. Each crew would be launched to the station with a total of eight film return capsules stowed in its TKS vehicle, all of which would be sent back to Earth during a single mission.
Even the plans formulated in the June 1970 decree turned out to be too ambitious. The assembly of the first flight-rated Almaz station (internally known as OPS-1) did not begin until October 1971 and the station was shipped to the Baikonur cosmodrome at the end of 1972. It was launched on April 3, 1973, under the cover name Salyut-2, which created the impression that it was of the same type as the civilian Salyut launched two years earlier. About two weeks later, as the first crew was making final preparations for launch aboard a Soyuz vehicle, Salyut-2 suddenly depressurized. The cause of the mishap was never established with certainty. The most plausible explanation was that the station had been hit by debris left behind in orbit by the upper stage of its Proton launch vehicle. As revealed in the 2019 Almaz history, the Russians had learned about the presence of the debris from Western news reports. The observed leak rate was consistent with a ten-millimeter hole having been punched in the hull. In an ultimate attempt to steal the thunder from Skylab, scheduled for launch on May 14, 1973, the Soviet Union launched another civilian DOS space station on May 11, but due to errors in the flight control system it burned its attitude control propellant to depletion just hours after launch and was disguised as Kosmos-557.
 Salyut-2 on the launch pad. (credit: NPO Mashinostroyeniya) |
Salyut-3 (OPS-2), orbited on June 25, 1974, hosted a single crew, Pavel Popovich and Yuri Artyukhin, who reached the station aboard Soyuz-14 in early July for a 14-day mission. The next crew, Gennadi Sarafanov and Lev Demin, failed to dock their Soyuz-15 spacecraft with the station in August. The third Almaz (OPS-3) was placed into orbit on June 22, 1976 and received its first visitors, the Soyuz-21 crew of Boris Volynov and Vitali Zholobov, two weeks later. The mission was cut short from 60 to 49 days because of medical problems experienced by Zholobov. The next crew, Vyacheslav Zudov and Valeri Rozhdestvenski, had to abort the docking of their Soyuz-23 spacecraft with the station in October 1976 and barely survived a surprise nighttime splashdown in a lake in Kazakhstan. The third crew of Viktor Gorbatko and Yuri Glazkov did manage to link up with the station in February 1977 and spent 18 days in space before returning aboard their Soyuz-24 spacecraft.
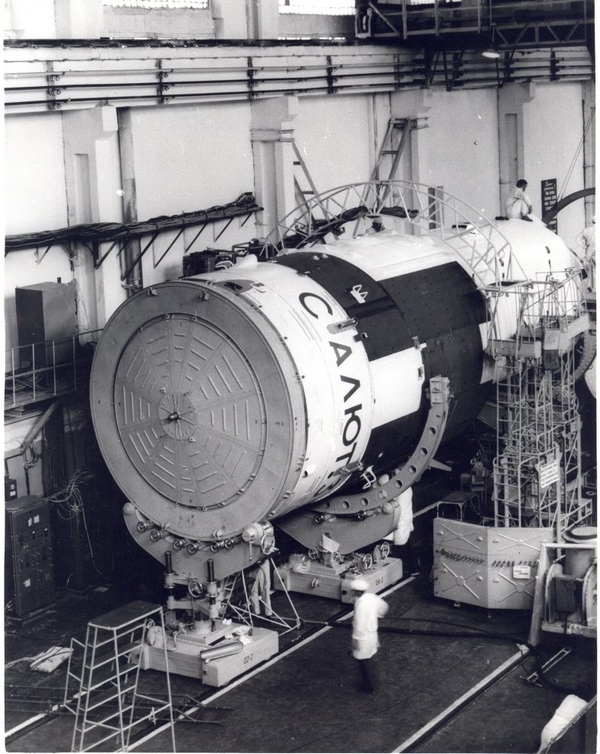 Salyut-3 during assembly. (credit: NPO Mashinostroyeniya) |
In all, Salyut-3 and 5 were manned for only about 2.5 months, raising the question how much operational reconnaissance work was actually done. Even the 2019 Almaz history reveals very little about the types of military observations that the crews made. The Agat-1 camera does seem to have lived up to expectations. One example of its performance given in the book is imagery of the Brooklyn Bridge in New York that was detailed enough to recognize brands of cars driving over the bridge and read advertisements written on trucks and trailers. It was also possible to determine types of ships and identify their names and hull numbers. This would indicate that the camera’s resolution was significantly better than the official value of one meter.
Some of the observations appear to have been purely experimental in nature, focusing on Soviet rather than foreign targets. For instance, the Soyuz-15 crew, which failed to reach Salyut-3, was supposed to have used a combination of instruments that included the Agat-1 optical camera and the Volga infrared camera to make observations of Soviet Navy vessels. Another version of the experiment seems to have been conducted by the Soyuz-24 crew on board Salyut-5.
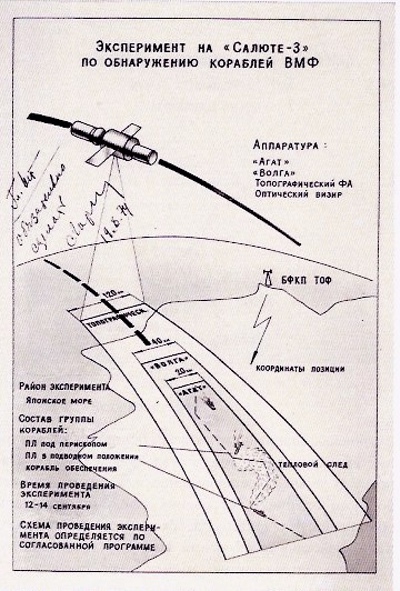 A declassified document from 1974 shows plans for observations of Soviet Navy vessels by the second crew of Salyut-3. (credit: NPO Mashinostroyeniya) |
The amount of data returned to Earth in the return capsules was probably limited. Salyut-3 was launched with two capsules, but only one was ejected, probably because of the Soyuz-15 docking failure. The 2019 Almaz history revealed that it made a hard landing due to a failure of its main parachute system. The film canisters were damaged and the film was exposed to daylight; it is not clear how much of it was useful. Salyut-5 carried a single return capsule, which was successfully retrieved after the departure of the final crew. It is highly questionable if any film was brought back to Earth aboard the Soyuz vehicles themselves. The amount of imagery returned via radio channels may not have been substantial either. All that is known about this is that during its 49-day mission aboard Salyut-5, the Soyuz-21 crew transmitted imagery to Earth on 18 occasions, some of it only 1.5 hours after it was made.
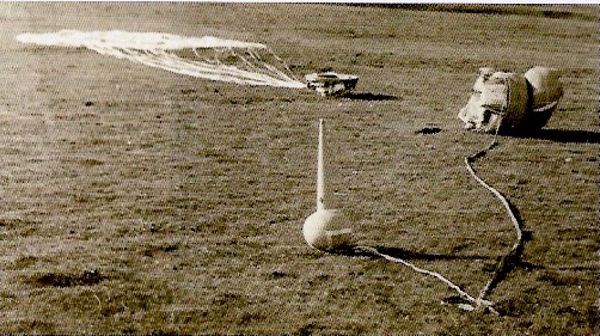 Almaz film return capsule after landing. (credit: NPO Mashinostroyeniya) |
The efficiency of the missions was also hampered by delays in the delivery of the non-optical payloads. While the Volga infrared camera seems to have been aboard both Salyut-3 and 5, the Mech-A radar and the Start ELINT equipment were not flown at all. Only Salyuts-2 and 3 carried some of the ASAT protection systems (the infrared detector, the periscope, and the rapid-fire cannon.) The cannon, a modified version of the NR-23 aircraft gun, was successfully fired right after the de-orbit burn of Salyut-3. It was not tested while the crew was on board because it was not known what the effects of the recoil would be. The crew did use stars to practice target acquisition, a task that turned out to be more time-consuming than expected. The ASAT protection systems were deleted from Salyut-5 to save mass. Aside from their military observations, the crews also spent a considerable amount of time doing non-military work (mostly biomedical experiments and Earth remote sensing), the only activities that were openly reported in the Soviet media at the time.
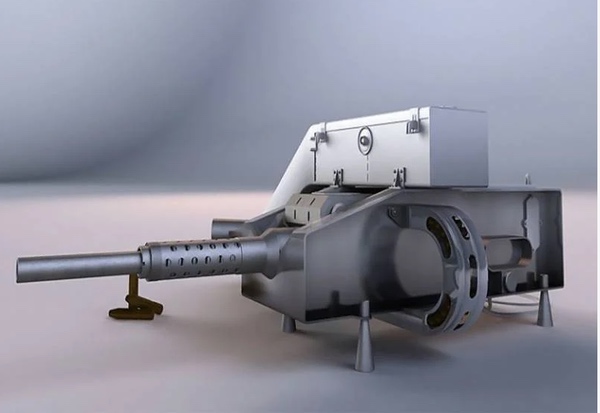 The modified NR-23 aircraft gun installed aboard Almaz. Source |
The TKS transport vehicles would ultimately never fly to Almaz. They were largely designed by a branch of Chelomei’s bureau that had also been assigned to work on the civilian DOS stations, meaning that the development of the vehicles essentially had to be frozen until 1974. The absence of TKS made it difficult to exploit the full potential of Almaz. TKS was not only capable of carrying a crew of three but could also deliver about four tons of cargo the station, including up to eight film return capsules, and use its engines to boost the station’s orbit. This would have made it possible to keep a single station in orbit for up to three years. Reboost capability was particularly crucial for Almaz because the stations operated at much lower altitudes than their civilian counterparts in order to obtain high-resolution imagery.
Soyuz could carry a crew of only two after modifications were made to the vehicle in the wake of the Soyuz-11 accident in 1971, which claimed the lives of three cosmonauts. Besides the crew, Soyuz could transport just 50 kilograms of cargo, reducing the operational lifetime of the stations to about six months (the lifetime was largely dictated by the amount of consumables that were stored on board during launch.) In addition to that, TKS had a maximum orbital lifetime of 90 days compared to just 60 days for Soyuz, which had an immediate impact on mission duration. What is generally overlooked though in histories of the Almaz project is that TKS and its Proton rocket were much more expensive to produce than Soyuz and its launch vehicle, making it questionable if it could have achieved the same kind of launch rate.
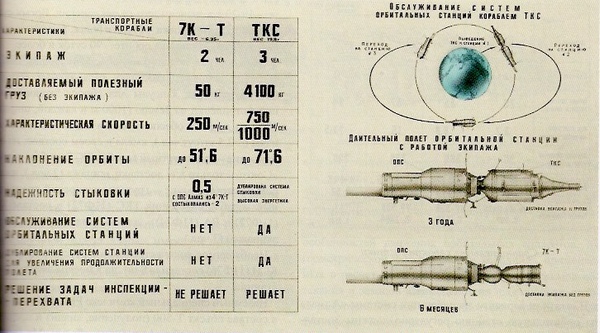 Table comparing the capabilities of Soyuz (7K-T) and TKS. (credit: NPO Mashinostroyeniya) |
By the late 1970s, the military’s enthusiasm for Almaz had cooled significantly. Although having a man in the loop may have looked attractive for a number of reasons when the project was conceived, actual flight operations showed that the presence of cosmonauts on board posed significant problems. A history of the Soviet/Russian Military Space Forces published in 1997 noted that what it called the “human-machine link” actually slowed down the processing and return of information. Much time was absorbed by servicing the space station and “maintaining the life support of the cosmonauts”, which must refer to routine activities such as eating, sleeping, and maintaining personal hygiene.
One important factor mentioned in more recent Russian literature is crew fatigue. The cosmonauts had irregular sleeping cycles because their work schedules were tied to the station’s shifting ground track, which took it over regions of interest at different times of the day. The problem was exacerbated by the fact that all the Almaz crews consisted of just two cosmonauts, making it difficult or impossible to work in shifts. Moreover, there was only one Almaz station in orbit at any given time (in contrast to the original plans), increasing the workload for the crew. Fatigue was found to have been an important underlying reason for the medical problems that forced the early return of the first Salyut-5 crew.
| One important factor mentioned in more recent Russian literature is crew fatigue. The cosmonauts had irregular sleeping cycles because their work schedules were tied to the station’s shifting ground track, which took it over regions of interest at different times of the day. |
Other drawbacks given by recent Russian sources are the high cost of the crew transportation systems (which, moreover, were not yet very reliable at the time, as evidenced by the Soyuz-15 and 23 docking failures) and the fact that the presence of life support systems limited the amount of equipment that could be placed on board. Another disturbing factor was the need to have civilian personnel at the mission control center to provide medical and psychological support to the crew members.
One can also assume that the interest in manned Almaz missions declined as the capabilities of Soviet robotic reconnaissance satellites gradually improved. In the mid-1970s, the Soviet Union introduced a new generation of spy satellites called Yantar-2K, which began to show their full potential by the end of the decade. Although they were no match for GAMBIT and HEXAGON, they were still a vast improvement over the Vostok-based Zenit satellites. They stayed in orbit longer, could eject two film return capsules before the main vehicle itself returned to Earth, and had a resolution that may well have come close to that of the Agat-1 camera on Almaz.
 The Yantar-2K reconnaissance satellite with film return capsules attached to either side. (credit: RKTs Progress) |
Besides all that, the budgets were, of course, not limitless. Beginning in 1976, Almaz faced competition not only from the DOS space stations, but also from the newly approved Buran project, which soon began gobbling up a significant portion of the budget for manned spaceflight. Personal relationships also came into play. Chelomei was on extremely bad terms with Dmitri Ustinov, who in his capacity as Secretary of the Communist Party in charge of defense matters was the de facto head of the Soviet space program from 1965 until 1976. Things didn’t improve when Ustinov was named Minister of Defense in 1976, which allowed him to exercise even more control over Soviet military space projects.
By the mid-1970s, it was also becoming clear that some of the tasks for which cosmonauts were initially thought to have been indispensable could just as well be performed automatically. Two examples of that were the loading of the return capsules with exposed film and preventing photography over cloud-covered areas. The latter could now also be achieved with the help of the Meteor weather satellites that the Soviet Union was by now launching on a regular basis (unlike the US, which had separate civilian and military weather satellites, the Soviet Union operated a single type of weather satellite that was used for both civilian and military purposes.).
When Salyut-5 was de-orbited in August 1977, the next Almaz station (OPS-4) was in the final stages of construction at the Khrunichev factory. It was the first to have two docking ports, one for Soyuz and another for TKS. It was also the first station supposed to carry the Mech-A radar and small space-to-space missiles to protect it from ASAT attacks.
 Space-to-space missiles developed for Almaz. Source |
The station scheduled to fly after that (OPS-5) was also under construction and could have been configured to receive two TKS vehicles at the same time, a version reportedly named Zvezda. However, any hope of flying these stations was definitively dashed by a government decree of June 27, 1978, that officially terminated the manned portion of the Almaz project, 12 years after it had been initiated.
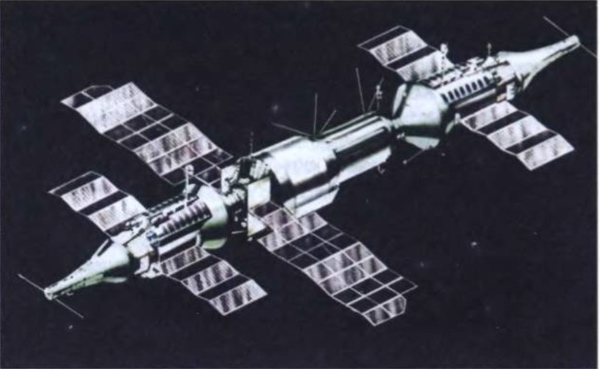 Version of Almaz with two docked TKS vehicles. (credit: NPO Mashinostroyeniya) |
Chelomei himself seems to have realized well before this that it would become difficult to justify the permanent presence of people aboard Almaz. However, he was not about to let the years of work invested in Almaz just go to waste. Even while the Almaz stations were still flying, his team began hammering out plans for versions of Almaz that could operate entirely automatically or be periodically visited by crews for maintenance and repairs. A total of five such stations appeared on the drawing boards:
Almaz-N: first proposed in 1972, this was a scientific version of Almaz carrying a wide range of equipment to observe the universe and the Earth in virtually all regions of the electromagnetic spectrum (the “N” stood for the Russian word for “science”). It may have evolved from an idea put forward by Chelomei and TsKBEM chief designer Vasili Mishin to build a civilian/military version of the Salyut stations under the name DOS-A. Mishin had not been enthusiastic about DOS (the proposal to develop it had been made behind his back) and was in favor of assembling a much larger space station using the massive N-1 rocket.
 The Almaz-N space station. (credit: NPO Mashinostroyeniya) |
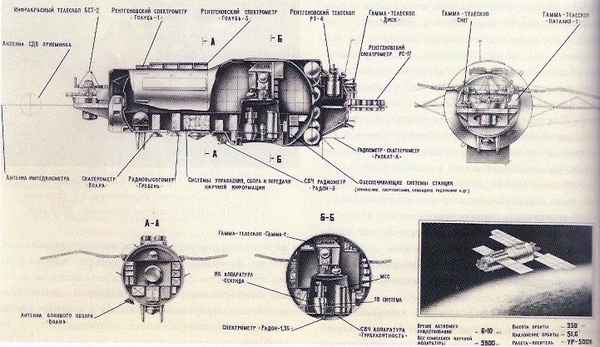
Almaz-T: a station carrying an improved version of the Mech-A radar (called Mech-K) for all-weather and nighttime imaging and a television reconnaissance system capable of sending back both images in near real time (the “T” in Almaz-T may have stood for “television”). Mech-K comprised two side-looking radars rather than one and could store its images on a video recorder for playback to Earth. A further modification (Mech-KU) could digitally process the radar images and beam them to the ground via data relay satellites. The TV system (called Lider) inherited technology from a television reconnaissance satellite project canceled earlier in the 1980 (see ”Soviet television reconnaissance satellites”, The Space Review, September 5, 2023.)
 Almaz-T with the Mech-K radar protruding from its nose. It could have been periodically visited by manned TKS vehicles. (credit: NPO Mashinostroyeniya) |
Almaz-K: a station carrying a set of four cameras that would work together to cover a swath of more than 120 kilometers with a resolution of about one meter. In a way, it was the Soviet equivalent of HEXAGON, which was also designed to provide imagery of large swaths of territory. It was to be equipped with up to 20 film return capsules that could be automatically loaded with film (the “K” stood for “capsule”). During missions lasting up to 30 days, the station’s orbit would drop to altitudes as low as 160 kilometers. It was mainly intended to keep an eye on local conflict zones.
 Almaz-K with its large array of film return capsules. (credit: NPO Mashinostroyeniya) |
Almaz-P: a station fitted with photographic and television equipment to detect changes in the deployment of military hardware both on land and at sea, and also to provide information on troop deployments in war theaters. It was designed to remain in orbit for three to five years and would be periodically visited by three-man TKS crews for missions lasting one to three months (“P” stood for “man-tended”). One option also considered was to launch the first crew in a return capsule attached to the station, as in the original Almaz plans of the mid-1960s. With the advent of the winter season in the northern hemisphere, when lighting and weather conditions are poor, Almaz-P would enter a hibernation mode, flying in a high storage orbit with most of its systems switched off.
Almaz-M: a station specifically intended for ocean observations (the “M” stood for “sea”). It would perform the same functions as the radar ocean reconnaissance satellites (US-A) and electronic ocean reconnaissance satellites (US-P) that the Soviet Union had been operating for several years. These were intended to provide targeting data for anti-ship cruise missiles developed by the Chelomei bureau. In addition to radar and ELINT systems, Almaz-M would carry infrared and TV equipment for ocean observations. Unlike the US-A and US-P satellites, it would be capable of detecting submarines. Almaz-M could stay in orbit for a year and calculations showed that a single Almaz-M mission would be almost three times cheaper than maintaining a full constellation of relatively short-lived US-A and US-P satellites for the same period of time. The Almaz-M proposal was put forward in 1978, not long after one of the nuclear-powered US-A satellites (Kosmos-954) had showered radioactive debris over Canada, forcing a significant redesign of the satellite. While Almaz-M would carry the same Chaika radar system as US-A (plus a Mech-A antenna), it would be powered by solar panels.
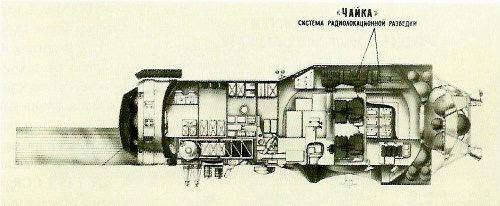 Almaz-M with the Mech-A and Chaika radar systems. (credit: NPO Mashinostroyeniya) |
It would appear that only Almaz-T and Almaz-K reached the stage of government approval. A government decree adopted on January 19, 1976, set optimistic timelines for the two stations, with test flights scheduled to begin in 1978 and both vehicles to be declared operational in 1979. Almaz-K never moved beyond the preliminary design stage, but Almaz-T did enter into production, possibly because the presence of both radar and optical instruments gave it much of the same versatility that had originally been expected from the manned Almaz stations.
The first Almaz-T was shipped to the Baikonur cosmodrome at the end of 1980. It was only about two weeks away from launch in the summer of 1981 when orders came “from above” to mothball the station, most likely from Chelomei’s lifelong enemy Ustinov. In 1979, work had also begun to transform the already manufactured hull of OPS-5 into Almaz-M, but on December 19, 1981, the Soviet government released another decree that cancelled all further work on the Almaz project, depriving Chelomei of any significant role in the space program. The full text of the decree has so far not been declassified, but it is also known to have called for speeding up work on Buran, a possible sign that the huge expenditures required for Buran played a role in the termination of Almaz.
| The first Almaz-T was shipped to the Baikonur cosmodrome at the end of 1980. It was only about two weeks away from launch in the summer of 1981 when orders came “from above” to mothball the station, most likely from Chelomei’s lifelong enemy Ustinov. |
Almaz-T eventually did get a new lease of life in 1985 (after the passing of both Ustinov and Chelomei in December 1984), at least partly thanks to the success of radar mapping payloads flown on the Space Shuttle in 1981 (STS-2) and 1984 (STS-41G). In a bizarre twist of fate, the Almaz-T station that had been languishing at Baikonur for nearly six years was lost in a Proton launch failure on November 29, 1986. Two other Almaz-T stations did make it into orbit on July 25, 1987 (under the name Kosmos-1870) and March 31, 1991 (Almaz-1, the only of the Almaz stations to be announced with its real name.)
Both missions, which lasted 737 days and 566 days respectively, were largely successful, although Almaz-1 (which carried the improved Mech-KU radar system) failed to deploy one of its two radar antennas, considerably reducing the ground swath. By this time, however, the military had largely lost its interest in the relatively low-resolution radar and TV imagery, which was mainly used for civilian purposes. In December 1982, the Soviet Union had begun launching digital reconnaissance satellites known as Yantar-4KS1 which were capable of sending back images in real time via Geyzer data relay satellites. These offered an estimated ground resolution of one meter, about twice the resolution that could be obtained by Almaz-T’s Lider TV system.
 Almaz-T on display in Moscow. Source
|
By May 1969, the plan had been to fly four manned MOL vehicles: in July 1972, January and July 1973, and January 1974. Two additional unmanned MOL vehicles would also fly. If MOL was continued to a Phase II, or Block II configuration, flights could continue on this schedule through January 1976.
According to former NRO Director John McLucas, by the time the MOL program was cancelled the cost had become unacceptable. “Aware of the rapidly improving capabilities of unmanned systems at the NRO, I was unconvinced that the MOL would be worth the cost,” McLucas wrote. “Although there was little tangible to show for the $1.4 billion spent on the MOL, some of its R&D would later help NASA in developing the three-man Skylab space station and the STS. Canceling the MOL saved at least $1.5 billion over the next three years, and the NRO received some of these funds to complete various subsystems and fold them into unmanned satellites.” One project that apparently benefitted substantially was the Defense Support Program (DSP) missile warning satellite. Although not an NRO program, it was a sophisticated satellite then in full-scale development and needed the money. As one DSP official later stated, “MOL saved our ass.”
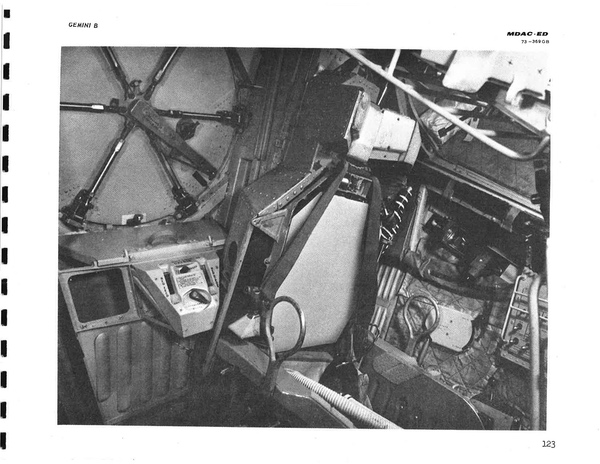
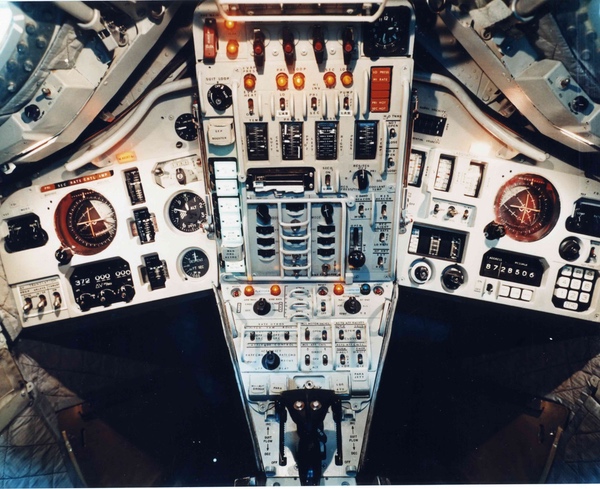 The Gemini B spacecraft for MOL would have been similar to the NASA Gemini spacecraft, with only minor changes to the cockpit controls. The MOL program planned to purchase four spacecraft. Had the program not been canceled, Gemini would have been flying into the mid-1970s. (credit: USAF) |
No Gemini spacecraft were procured for MOL. Significant hardware, but no flight systems, was left over, and some of this was offered to NASA, which had little use for it. Several large mirrors had been procured for the DORIAN optics system. These were nearly complete because the mirrors were considered long lead-time items, meaning that because they took so long to produce and integrate into the spacecraft systems, they were ordered early in the program. Under the name Project COLT, the mirrors were eventually turned over to a ground observatory and formed the basis for the Multi-Mirror Telescope (MMT) erected on Mount Hopkins south of Tucson, Arizona in the late 1970s. The MMT operated until 1998, at which point the multiple mirrors were replaced with a single, large mirror. The mirrors remain in storage to this day.
 One of MOL’s legacies was that it developed large, lightweight space optics. The technology developed for MOL’s DORIAN optical system was later used in the Hubble Space Telescope. This Hubble mirror was manufactured by Perkin-Elmer Corporation. A backup mirror was manufactured by Eastman Kodak, the same company that developed the DORIAN optics. That mirror now belongs to the Smithsonian’s National Air and Space Museum. (credit: NASA) |
The NRO apparently studied the possibility of using DORIAN optics and the HEXAGON satellite recovery vehicles as part of a project that was euphemistically labeled HEXADOR. There are no indications that this study proceeded very far before cancellation. The goal of such a system was to provide “very high resolution” imagery, apparently renamed as “ultra high resolution” imagery, which probably referred to imagery of six inches (15 centimeters) on the ground or better. The CIA did not agree that the resolution goal was necessary, and the agency was more interested in the development of the KENNEN near-real-time reconnaissance satellite.
| One project that apparently benefitted substantially was the Defense Support Program (DSP) missile warning satellite. Although not an NRO program, it was a sophisticated satellite then in full-scale development and needed the money. As one DSP official later stated, “MOL saved our ass.” |
The GAMBIT-3 satellite was continuously updated throughout the 1970s, including better film and the addition of a second camera system to take advantage of its highest resolution, and eventually its resolution rivaled that of the DORIAN system. In addition, in 1971 the NRO began development of the KH-11 KENNEN near-real-time reconnaissance satellite. Although details remain classified, it appears as if KENNEN’s original goal resolution was around 30 centimeters (12 inches), but by the 1980s this was improved to potentially the equivalent of DORIAN’s resolution or better. Perhaps DORIAN’s most important contribution to reconnaissance was the development of lightweight optics. The optics technology developed for DORIAN was incorporated into later versions of the GAMBIT-3, as well as the KH-11 KENNEN and even the Hubble Space Telescope. There are some indications that a sophisticated target selection and prioritization software program developed for MOL also may have been used in later reconnaissance projects.
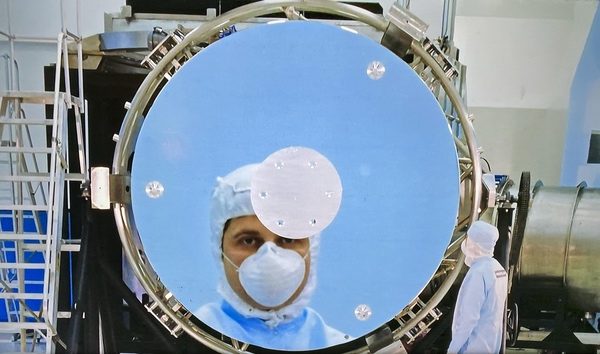
 A NASA scientist standing in front of the optics for the Roman Space Telescope. These optics were left over from a cancelled reconnaissance program. The photograph was taken in the former Kodak Building 101, which still uses equipment developed in the 1960s for the MOL program. (credit: NASA) |
There was also substantial physical infrastructure developed for MOL. A processing building built by Douglas in California was used for other projects. At Kodak, Building 101 was constructed and equipped to produce and test the DORIAN optics. According to former Kodak employees, it was the most sophisticated and comprehensive optics integration and testing facility in the world. It was later used for GAMBIT-3, KENNEN, and later systems, and is still in use today for civil, commercial, and classified projects.
The powerful Titan IIIM rocket that was slated to launch MOL into orbit was not tested before the program was canceled. In the 1980s, when the Air Force needed a rocket with greater lifting capability, it selected the Titan IV, which owed much of its design to the work performed on the Titan IIIM.
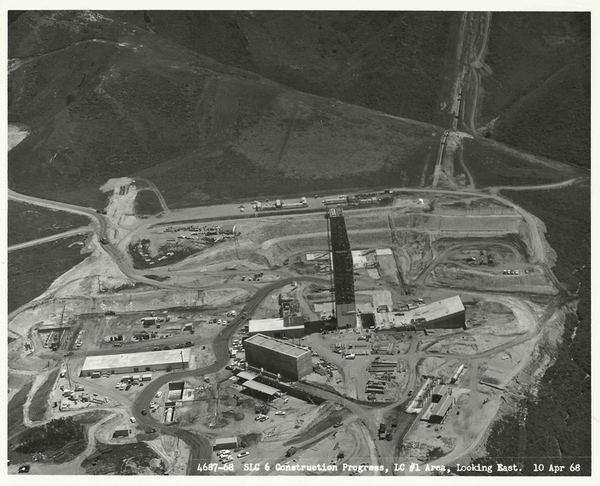 Space Launch Complex 6 (“Slick Six”) at Vandenberg Air Force Base in April 1968. (credit: Joe Page II) |
Space Launch Complex-6 (“Slick-Six”) at Vandenberg Air Force Base in California had been under construction for several years by the time MOL was cancelled. Land had been cleared and excavated, a concrete base and flame ducts had been constructed, and work on multiple structures including a launch tower was underway. Despite the June 1969 cancellation, the remaining construction work continued until early 1970 and the mostly-complete launch facility was then placed in mothballs (the abandoned facility appeared in a 1970s episode of “The Bionic Woman”). Vandenberg already had a facility for launching the Titan, and SLC-6 was redundant. In the later 1970s, SLC-6 was selected as the West Coast launch site for the Space Shuttle. The complex was substantially overhauled and expanded, but then placed into mothballs again in 1986. (SLC-6 also appeared in the terrible 2022 movie “Moonfall,” where it launched a shuttle before it was destroyed by a tsunami.) In the early 2000s, SLC-6 was again overhauled and converted to support the Delta IV family of rockets. Now, after launching its last Delta IV, SLC-6 has been turned over to SpaceX and will support Falcon Heavy launches starting in 2025 or 2026.
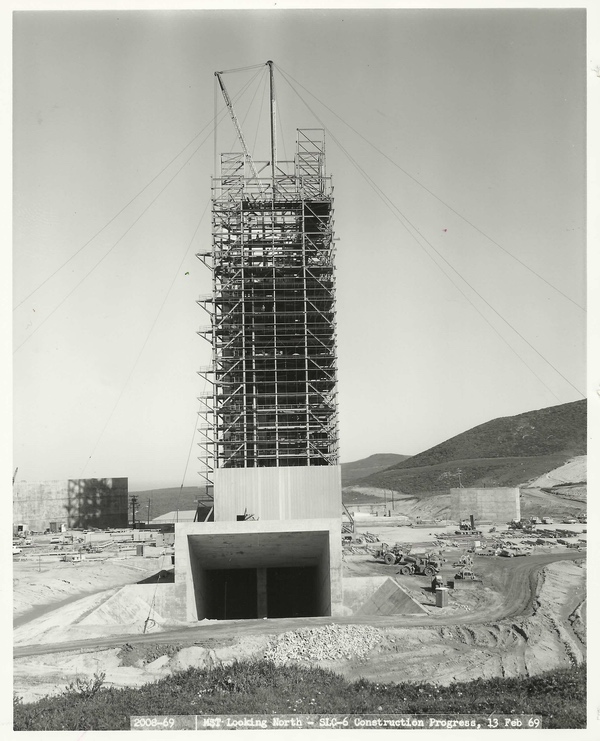 Space Launch Complex 6 at Vandenberg Air Force Base in February 1969. The pad would have supported the Titan IIIM, the most powerful rocket planned for Vandenberg at that time. It required major infrastructure, including flame trenches to deal with the exhaust from large solid rocket motors. (credit: Joe Page II) |
MOL had an additional legacy in the MOL astronauts who went on to other programs. Half became NASA astronauts whereas the other half ended up in other military and civilian roles.
 Space Launch Complex 6 in August 1969. When MOL was canceled in June 1969, construction on SLC-6 was nearing completion. It was allowed to continue until early 1970, at which point the facility was placed in mothball status. In the 1970s, the TV show “The Bionic Woman” filmed an episode there. In the 1980s it was converted to launch the Space Shuttle. It never launched a shuttle and was again shut down in 1986 after the Challenger accident. In the 2000s, it was converted to launch the Delta IV. The facility is now going to be converted to launch the Falcon Heavy. (credit: Joe Page II) |
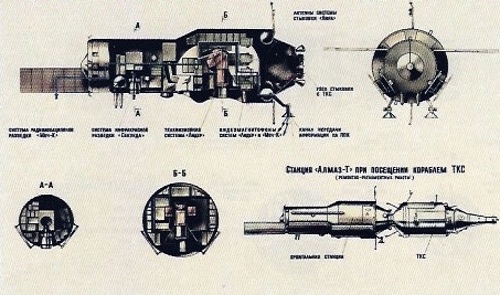
Almaz left an important spaceflight legacy. Both the station itself and the TKS spacecraft were the predecessors of spacecraft that continue to fly today. As described above, the first offshoot of Almaz was the civilian DOS space station. The first DOS version essentially consisted of an Almaz hull with a modified Soyuz propulsion compartment added to the “large-diameter section,” where Almaz had its docking port, and a transfer compartment with a docking port to the “small-diameter” section, so Soyuz vehicles would be docking at the “thin end” of the space station. The 2019 Almaz history claims that the transfer compartment was derived from the second stage of the Chelomei bureau’s UR-100 ICBM.
 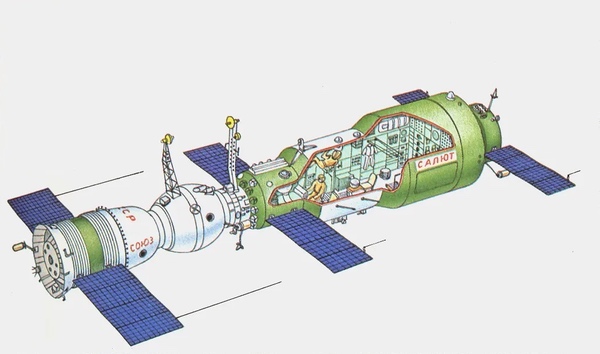 Comparative view of Almaz/Soyuz and DOS/Soyuz |
This was the configuration of DOS used for the first Salyut space station in 1971 and another one that failed to reach orbit in 1972. A second version with a set of three solar panels and a modified engine compartment flew as Kosmos-557 in 1973 and Salyut-4 in 1974. The next- generation stations, Salyut-6 in 1977 and Salyut-7 in 1982, had two docking ports, making it possible to resupply and refuel them with Progress cargo vehicles. They were followed by the core module of the Mir space station in 1986, which sported six docking ports to form the first modular space station. The final descendant of Almaz was the Zvezda Service Module, the second Russian element of the ISS, launched in 2000. The typical tapered configuration of Almaz was even used by China for the Tianhe core module of its Tiangong space station.
Although the TKS spacecraft never flew to Almaz, one carried out a solo unmanned test flight in 1977 under the name Kosmos-929 and three others—Kosmos-1267, 1443, and 1686—made unmanned missions to Salyut-6 and Salyut-7 in 1981, 1983, and 1985. The VA descent modules of Kosmos-929, 1267, and 1443 successfully returned to Earth (Kosmos-1686’s VA was redesigned to carry military observation equipment.) Pairs of VA descent modules had also been tested individually on three orbital missions launched by the Proton rocket between 1976 and 1979.
The cargo section of the TKS vehicles, known as FGB, went on to serve as the basis for designing four add-on modules of the Mir space station: Kvant-2, Kristall, Spektr, and Priroda. These consisted of an FGB section with one or more additional compartments tailored to the module’s specific needs.
 The Mir space station with four radially docked modules derived from the TKS vehicles. (credit: NASA) |
The FGB also lived on in Zarya, the first element of ISS, which inherited its acronym from its progenitor. The last vehicle in the FGB lineage is the Nauka Multipurpose Laboratory Module, which docked with the ISS Russian segment in July 2021 after many years of launch delays.
 The Nauka module, the last descendant of Chelomei’s TKS spacecraft. (credit: NASA) |
At the time that both MOL and Almaz were conceived, the reliability of space electronics was low, and there was a common belief in both superpowers’ space programs that humans could contribute to mission reliability. That dynamic changed over time, but at a different pace for both countries. It is unsurprising that the United States canceled MOL before the Soviet Union canceled Almaz because reliability and lifetimes increased faster for American spacecraft throughout the 1960s than they did for Soviet spacecraft, and therefore the value of military astronauts was called into question in the United States sooner than in the Soviet Union.
| lthough popular depictions of human spaceflight in the 1950s and ’60s showed military officers in military spacecraft, half a century of experience has demonstrated that in space, for a vast range of missions, the best soldier is a robot. |
The internal political factors affecting both programs were different and complicated. The American civilian astronaut program moved fast, launching multiple Gemini flights and sending Americans to the surface of the Moon in just over eight years, while MOL seemed to suffer perpetual schedule slips. MOL was originally supposed to fly by late 1968, but if MOL had succeeded in achieving its revised July 1972 launch date, that would have come seven years after presidential approval, and eight and a half years after initial program start. At the same time, civilian and military leaders could look at the rapid advances in robotic reconnaissance systems—major upgrades were happening every two to three years—and suspect that the inclusion of astronauts in MOL was a mistake.
Some senior officials believed that MOL had been started more from a desire to give the military an astronaut program than to meet intelligence requirements. Although the American military played a major role in strategic intelligence collection, most of the collection requirements were established by civilians, which meant that in several cases CIA-led programs ultimately prevailed over military-led programs. When budgets became tight, MOL’s niche capabilities were less important than the need for area coverage of the vast Soviet landmass, a requirement that served the Nixon Administration’s interest in arms control as well as strategic intelligence needs.
Soviet political dynamics were more cutthroat and less logical than the Americans. There was less of a distinction between military interests and intelligence requirements. And as was common to many Soviet space programs, bad personal relationships often impacted program decisions. In contrast to the United States, the Soviet Union learned through actual flight experience that humans did not add much value to military space missions, and by the time the Almaz missions flew, new robotic spacecraft were beginning to match Almaz’s capabilities.
There are still unknowns about both programs. In the United States, the National Reconnaissance Office has released a large number of documents on MOL, and former MOL astronauts have spoken about their participation, but there have been indications that more MOL documents exist than have been made publicly accessible. Some are undoubtedly classified, while others may only exist in personal collections. One area that is still unclear is what the high-level intelligence advisory groups said about MOL during its troubled development. Those documents may still exist in presidential archives but have not yet been released. Another subject is the views of those involved in the robotic reconnaissance programs at the time. Did those involved in GAMBIT believe that they could eventually achieve most of MOL’s capabilities at lower cost? There is also some indication that senior CIA officials did not agree that MOL fulfilled an important intelligence requirement, although that too remains murky. Finally, one aspect of MOL operations remains deleted from available documents: its ability to image other satellites in orbit. This capability was soon added to the GAMBIT satellites, but was apparently one of MOL’s justifications in its later years.
As for Almaz, there are many unknowns. Despite the numerous publications on Almaz, most of the information on the program has come from sources with their own agendas and few government documents on the project have been declassified, making an overall objective assessment of Almaz difficult. Some areas remain murky, such as whether Almaz was really a direct response to the publicly announced MOL program, and how much reconnaissance work was actually done by the crews that flew aboard the stations. Unfortunately, Russia’s increasingly authoritarian political situation has had a chilling effect on openness, even on historical subjects.
In the five decades since the end of these programs, there have been no military astronauts performing operational military missions in orbit, a situation that is unlikely to change. Although China uses military institutions to perform civilian missions, even China has apparently concluded that human spaceflight is a civilian mission. Although popular depictions of human spaceflight in the 1950s and ’60s showed military officers in military spacecraft, half a century of experience has demonstrated that in space, for a vast range of missions, the best soldier is a robot.
| Almaz | MOL | |
|---|---|---|
| Duration of the program | 1964-1978 (manned), 1972-1991 (unmanned) | 1963-1969 |
| Crew | 2 | 2 |
| Mass | 18,900 kg (41,667 lb) | 14,476 kg (31,914 lb) |
| Dimensions | Length: 11.61 meters (38 feet) (without Soyuz) / 18.59 meters (60.9 feet) (with Soyuz) Diameter: 2.9 meters (9.5 feet) to 4.1 meters (13.4 feet) (tapered hull) | Length: 21.92 meters (71.9 feet) (with Gemini) Diameter: 3.05 meters (10 feet) |
| Optical system resolution | 1 meter (39.3 inches)(returned film)* / 1.5 meters (59 inches) (transmitted images) Agat-1 optical system | 10 centimeters (4 inches) DORIAN optical system |
| Orbital inclination | 51.6 degrees | Polar |
| Missions | Flown: April 1973 (Salyut-2) (no visits) June 1974 (Salyut-3) (1 visit) June 1976 (Salyut-5) (2 visits) | Planned, not flown: July 1972 January 1973 July 1973 January 1974 (plus two unmanned, operational missions) |
| Maximum mission duration | 60 days (planned) 49 days (demonstrated) | 30 days (up to 45 days for Block II) |
| Spacecraft | 1 Soyuz | 1 Gemini |
| Armament | Rapid-fire cannon, periscope, infrared detector | None |
| Launch vehicle | Proton | Titan IIIM |
| Components | Soyuz, pressurized laboratory module | Gemini, pressurized laboratory module, unpressurized mission (optics) module |
| Power source | Solar panels | Fuel cells |
*This is the official value, but the actual resolution was probably much better, possibly around 40 centimeters (15.7 inches)
Note: we are using a new commenting system, which may require you to create a new account.